3. SIGNALS AND WIRING
3 - 35
3.6.2 Speed control mode
(1) Speed setting
(a) Speed command and speed
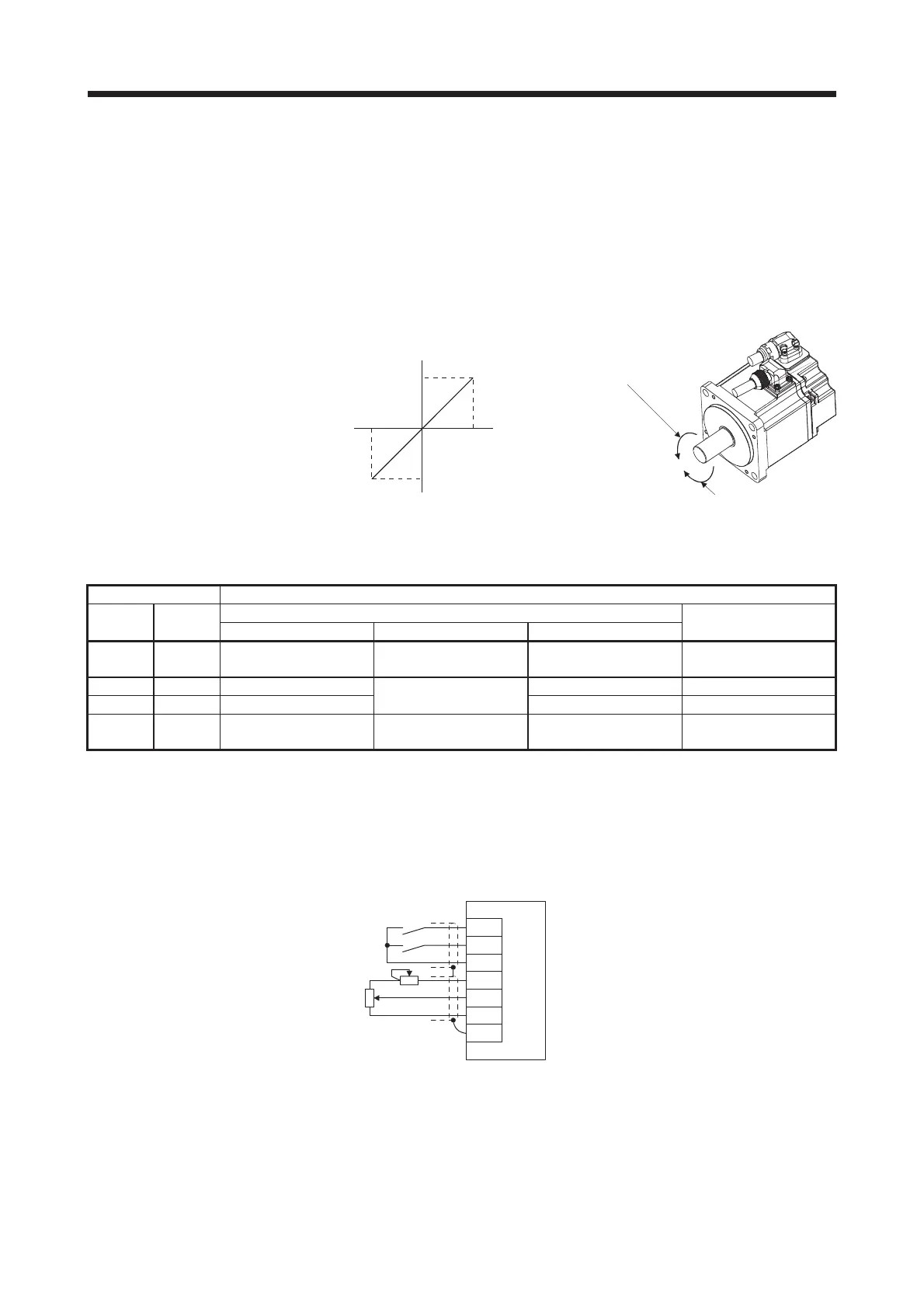
The servo motor is run at the speeds set in the parameters or at the speed set in the applied voltage
of VC (Analog speed command). A relation between VC (Analog speed command) applied voltage
and the servo motor speed is as follows.
Rated speed is achieved at ±10 V with initial setting. The speed at ±10 V can be changed with [Pr.
PC12].
࿁
ォ
ㅦ
ᐲ
[r/min]
CW
ᣇะ
ቯᩰ࿁ォㅦᐲ
[r/min]
ቯᩰ࿁ォㅦᐲ
[r/min]
0
CCW
ᣇะ
+10
-10
VC
ශട㔚
[V]
ᱜォ
(CCW)
ㅒォ
(CW)
The following table indicates the rotation direction according to ST1 (Forward rotation start ) and ST2
(Reverse rotation start) combination.
(Note 1) Input device (Note 2) Rotation direction
VC (Analog speed command)
ST2 ST1
Polarity: + 0V Polarity: -
Internal speed command
0 0
Stop
(servo-lock)
Stop
(servo-lock)
Stop
(servo-lock)
Stop
(servo-lock)
0 1 CCW CW CCW
1 0 CW
Stop
(no servo-lock)
CCW CW
1 1
Stop
(servo-lock)
Stop
(servo-lock)
Stop
(servo-lock)
Stop
(servo-lock)
Note 1.
2)
0: Off
1: On
If the torque limit is canceled during servo-lock, the servo motor may suddenly rotate according to position deviation in respect
to the command position.
Normally, connect as follows.
2k䕑
2k䕑
ᣣᧄᛶ᛫ེ
RRS10⋧ᒰ
ST2
DOCOM
P15R
VC
LG
SD
ࠨࡏࠕࡦࡊ
ST1
(ᵈ)
Note. This diagram is for sink I/O interface. For source I/O interface, refer to section 3.9.3.
VC applied voltage [V]
Speed [r/min]
Rated speed [r/min]
Rated speed [r/min]
CCW direction
CW direction
Forward rotation (CCW)
Reverse rotation (CW)
Servo amplifier
(Note)
Japan resistor
RRS10 or equivalent

 Loading...
Loading...







