2 Rob ot arm
Options
2-28
■ Cable configuration
The configuration of the flexible cable is shown in Table 2-12. Refer to this table when selecting the cable bare.
Table 2-12 : Cable configuration
Note) The square in the cable name indicates the cable length.
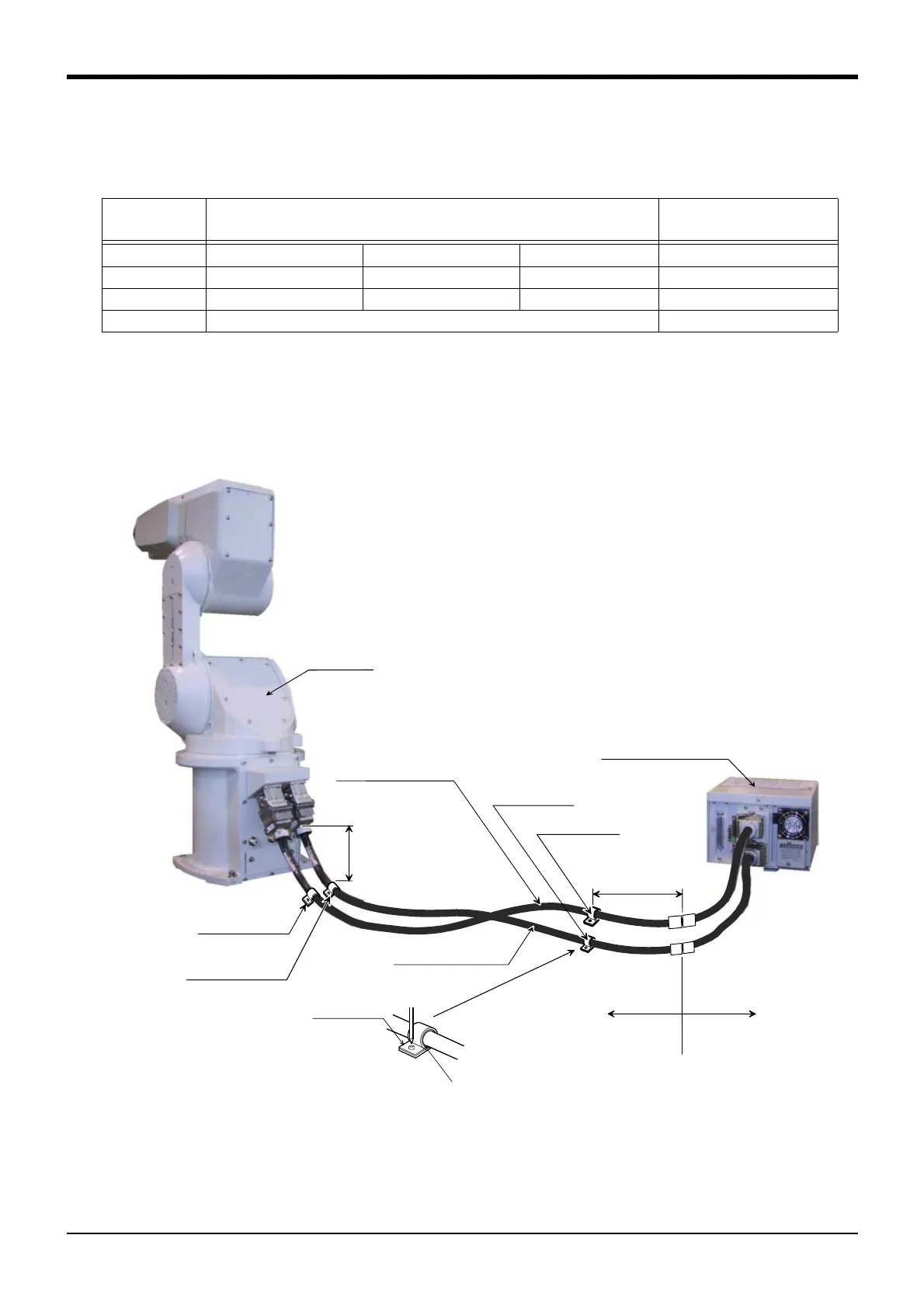
■ Fixing the flexible cable
(1) Connect the connector to the robot arm .
(2) Wind the silicon rubber around the cable at a position 300 to 400 mm from the side of robot arm and exten
-
sion section as shown in Fig. 2-10, and fix with the nylon clamp to protect the cable from external stress.
Fig.2-10 : Fixing the flexible cable
Item
Motor signal cable
1S- □□ LCBL(S)-01
Motor power cable
1S- □□ LCBL(P)-02
No. of cores
AWG#24(0.2mm
2
)-4P AWG#24(0.2mm
2
)-7P AWG#18(0.75mm
2
) AWG#18(0.75mm
2
) -3C
Finish dimensions Approx. φ6mm Approx. φ8.5mm Approx. φ1.7mm Approx. φ6.5mm
No.of cables used 5 cables 1 cable 1 cable 10 cables
No. in total 7 cables 10 cables
CR1B-571 controller
Silicon rubber
Nylon clamp
300~400mm
300~400mm
NK-18N
NK-14N
NK-14N
NK-18N
1S-□□LCBL(P)-02
1S-□□LCBL(S)-01
The fixed cable 5m
(standard attachment)
Extended flexible cable
(optional)
Nylon clamp
Robot arm
Extension section
Nylon clamp
Nylon clamp
Nylon clamp
 Loading...
Loading...




