4.3.3 Data-Hold Input (Latch Inhibit)
Pin: c17
Logic: HIGH
Data Hold is another means, besides Data Ready, to ensure that paral-
lel data transfer does not occur during data update. When Data Hold
(C17) is high, data does not update.
4.3.4 External Start Input (Features)
Pin: c16
Logic: HIGH
The External Start Input permits the timing of the measuring cycle
(i.e., the interrogation pulses) to originate from an outside source.
The Master/Slave Input (see below) logic must be HIGH before the
sensor can be interrogated, normally it is set LOW.
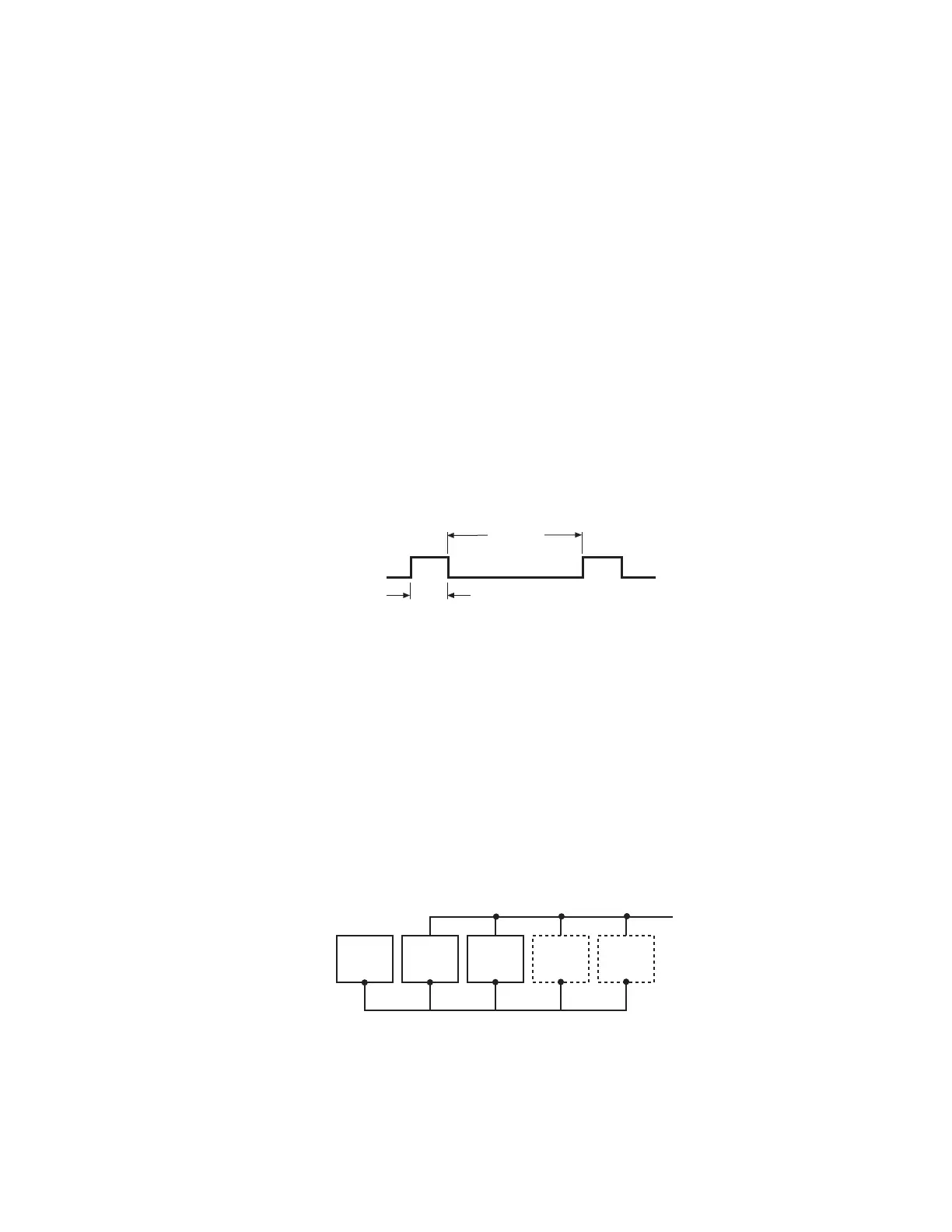
Start signals must be between 6 to 10 microseconds in duration and
repetition period must exceed the minimum cycle time -- refer to pro-
gramming section of the manual: (MR) Measuring Range.
Figure 4-9 External Start
4.3.5 Master/Slave Input (Features)
Pin: c13
Logic: HIGH
If an application requires that more than one Temposonics position
sensor provide position data simultaneously, the Master/Slave Input
may be used. It is essential to identify the longest position sensor as
the master device since it possesses the longest cycle time. The mas-
ter "start" command is switched to output 'c7' and linked to slave out-
put 'c16' (External Start Input).
Figure 4-10 Master/Slave