3. System Components
3.1 MK292-Compatible Temposonics Position Sensors
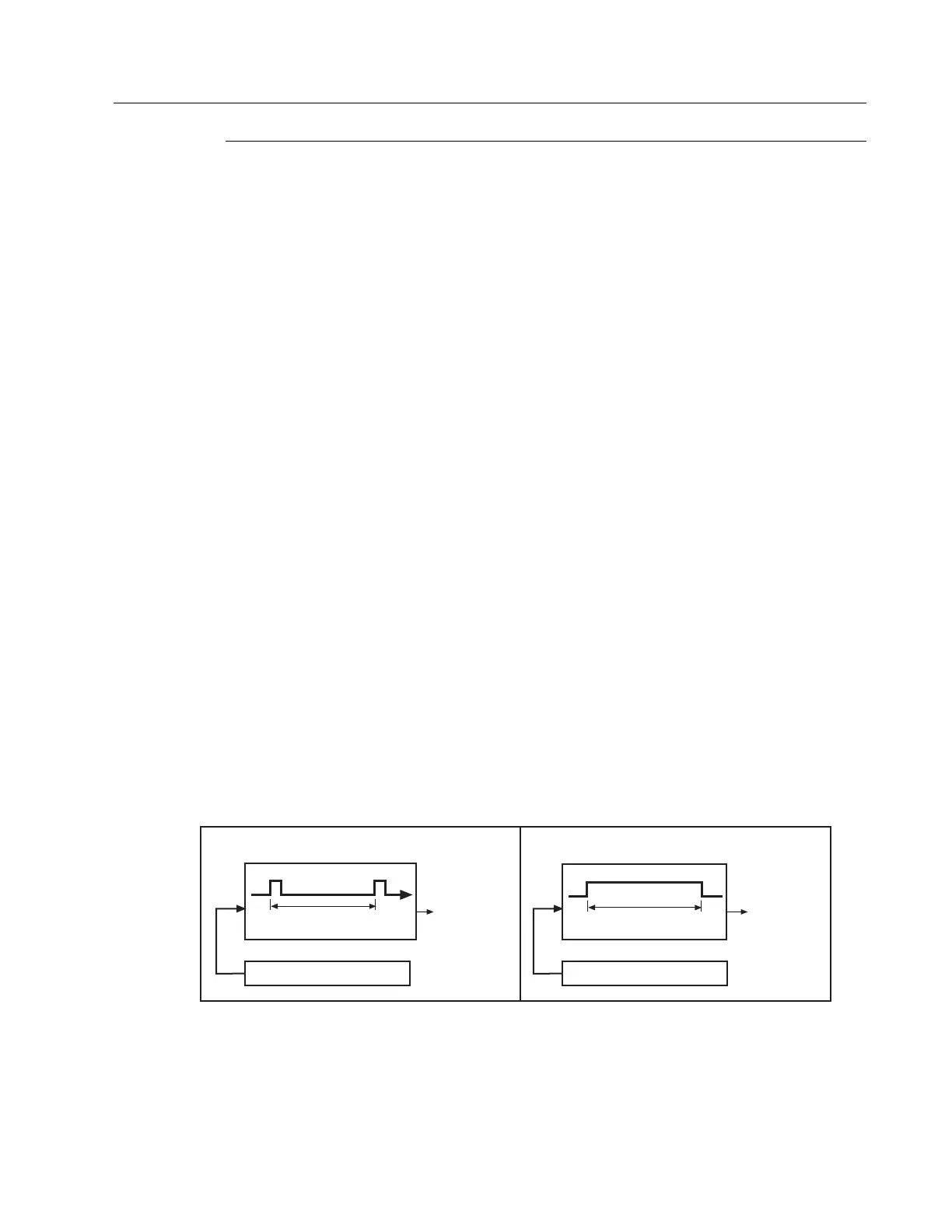
To interface with the MK292, a start/stop or pulse-width modulated output (see figure
3.1) is required from the Temposonics position sensor. The MK292 will convert these
signals into a parallel BCD, Gray Code, or binary output.
COMPATIBLE SENSORS
3.1.1. Temposonics Position Sensor with Start/Stop Output
Temposonics L Series and LP position sensors provide a direct RS422 compatible
start/stop output. Temposonics II position sensors require an RS422 Personality
Module (RPM), installed in the sensor head, to produce a start/stop output.
3.1.2. Temposonics Position Sensor with Pulse-Width Modulated (PWM) Output
Temposonics L Series position sensors provide a direct pulse-width modulated output.
Temposonics II position sensors require a Digital Personality Module (DPM) to gener-
ate a pulse-width modulated output. The DPM is installed in the head of the sensor's
electronics enclosure.
When using a Temposonics sensor with a PWM output, "external interrogation" is
required to interface with the MK292. External interrogation is an option selected at
the time of order and is pre-set at the factory.
3.1.3. Temposonics Position Sensor with Synchronous Operation (External
Interrogating)
In synchronous operation, an interrogation pulse is supplied to the position sensor
from the MK292 module. After supplying the interrogation pulse, the MK292 waits for
the sensor's return pulse, then ends the cycle. The time between the launching of the
interrogation pulse and the receipt of the return pulse is proportional to the distance
between the null or zero position and the movable magnet.
Figure 3-1
Start/stop and PWM Outputs