24
7
(Operation of Robot Stick)
Press the [Play/Pause] button
on the robot stick to run the
project.
When the project is in the
running state, the robot's ring
will flash green.
8
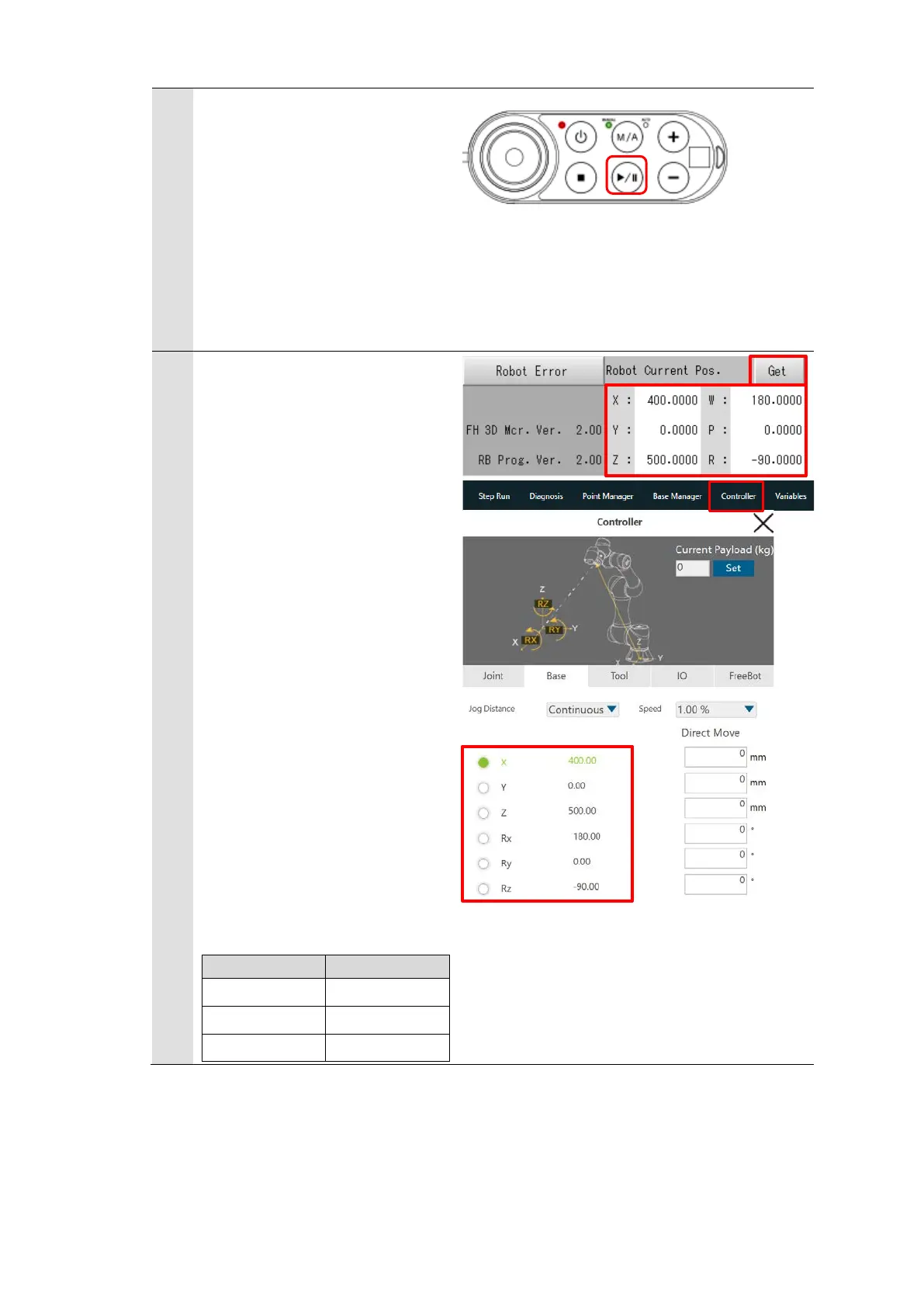
(Operation of the Vision
Sensor and TMflow)
Like shown on the right
figure, when [Get] is clicked
on the Main Window of the
Vision Sensor and the current
robot position on TMflow is
displayed at the same position
on the Main Window of the
Vision Sensor,
sending/receiving commands
between them have been
succeeded.
* The current robot position
can be checked by clicking
[Controller] on the project
editing toolbar.
* Correspondence relation of
notation

 Loading...
Loading...














