9. Appendix ECAT[i] Structure Elements
The Controller uses motion controller technology developed by Delta Tau Data Systems, Inc.,
(hereafter referred to as DT) in the U.S., however, the ECAT[i] structure elements differ from those of
DT controllers. The following table shows the major changes that have been made from DT
controllers.
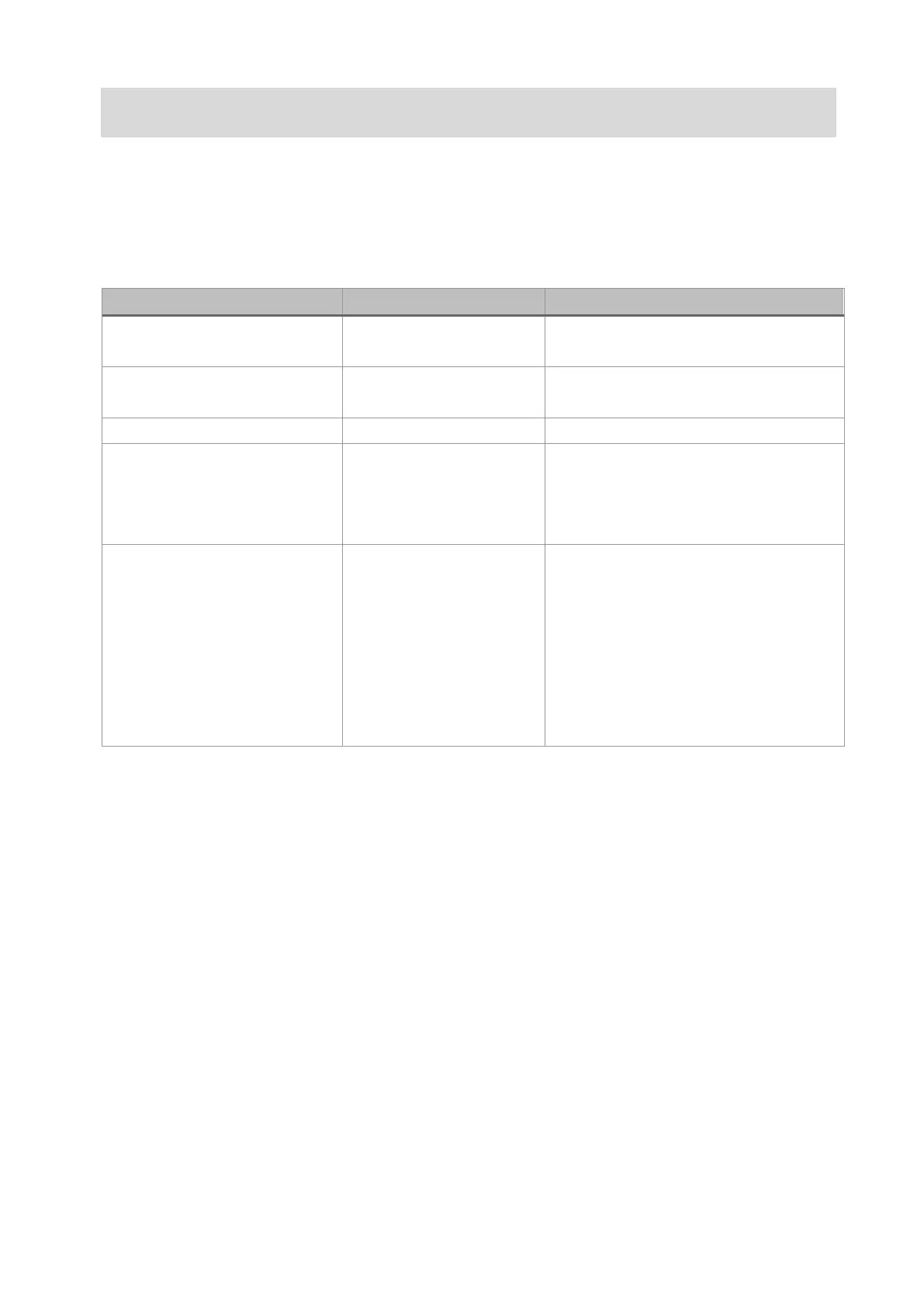
Element name Description Change
ECAT[i].Enable Enabling the EtherCAT
network
0: Disable, 1: Enable (2 and 3 are not
supported.)
ECAT[i].LPIO[k] Elements of low priority
I/O module
Not supported
ECAT[i].Slave[j] Slave elements Not supported
ECAT[i].Error Error code of enabling
EtherCAT network
$ 9811000C: Invalid network
configuration
$ 9811002E: Disconnected network
connection
ECAT[i].LinkUp
ECAT[i].LPDomainOutputState
ECAT[i].LPDomainState
ECAT[i].LPRxTime
ECAT[i].LPTxTime
ECAT[i].MasterStat
ECAT[i].RTDomainOutputState
ECAT[i].RTDomainState
Status data structure
elements
Not supported
 Loading...
Loading...






