4-20
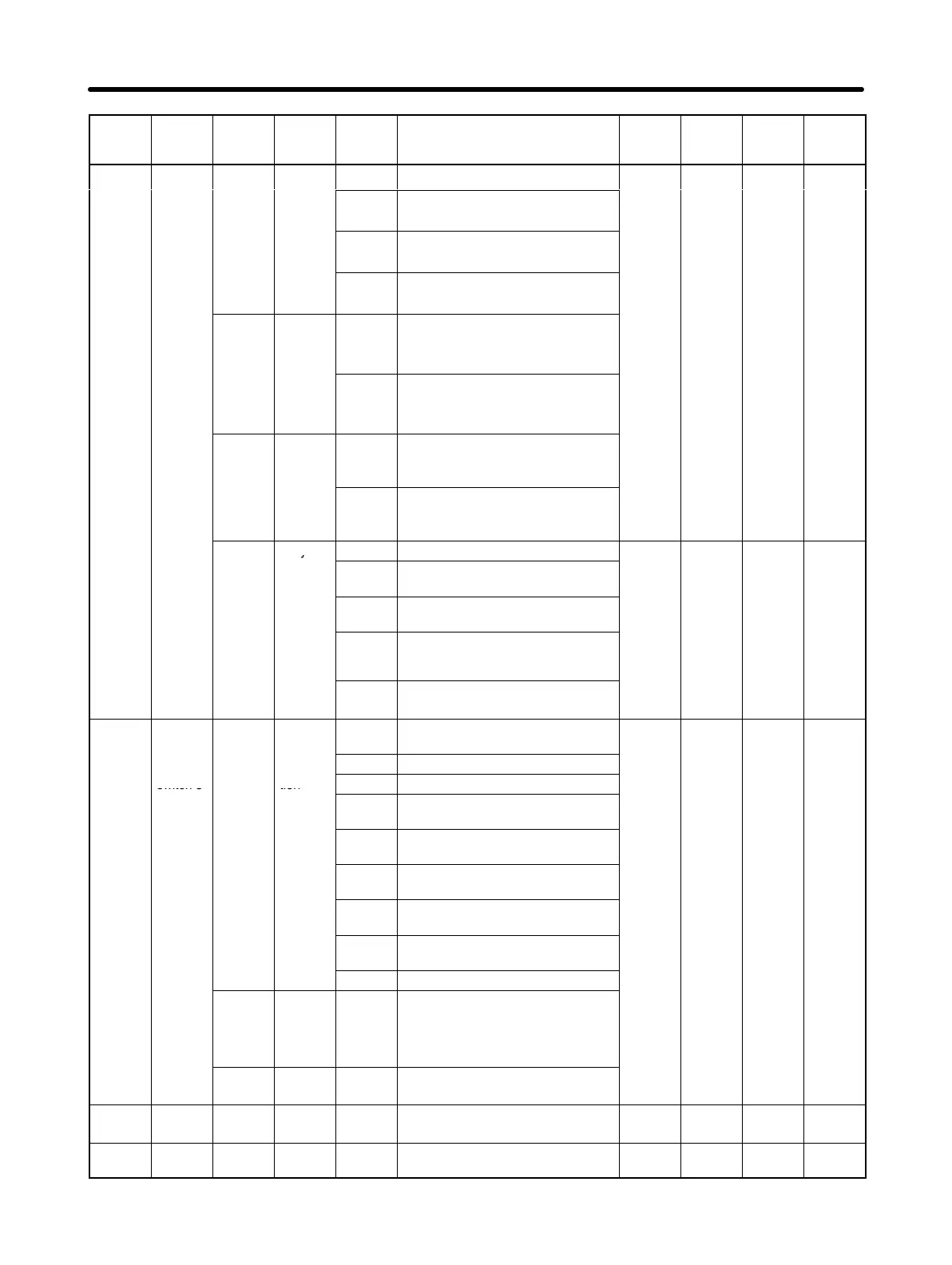
Param-
eter No.
Restart
power?
Setting
range
UnitDefault
setting
ExplanationSettingNameDigit
No.
Param-
eter
name
Pn002 Function
-
0 Torque
-
0 Not used.
0000 --- --- Yes
se
ec-
tion ap-
plication
com-
mand
input
1 Use TREF as analog torque limit
input
sw
tc
c
ange
(during
position
2 Use TREF as torque feed forward
input
and
speed
control)
3 Use TREF as analog torque limit
when PCL and NCL are ON
1 Speed
com-
mand
input
0 Not used.
change
(during
torque
control)
1 Use REF as analog speed limit input
2 Opera-
tion
switch
0 Use as absolute encoder
w
en
using
absolute
encoder
1 Use as incremental encoder
3 Fully-
0 Fully-closed encoder is not used.
0000 --- --- Yes
closed
encoder
1 Fully-closed encoder is used without
phase Z.
u
method*
2 Fully-closed encoder is used with
phase Z.
3 Fully-closed encoder is used in Re-
verse Rotation Mode without phase
Z.
4 Fully-closed encoder is used in Re-
verse Rotation Mode with phase Z.
Pn003 Function
selec-
0 Analog
monitor
0 Servomotor rotation speed:
1V/1000 r/min
0002 --- --- ---
tion ap-
1 (AM)
-
1 Speed command: 1 V/1000 r/min
n
switch 3
-
tion
2 Torque command: 1 V/rated torque
3 Position deviation:
0.05 V/1 command unit
4 Position deviation:
0.05 V/100 command units
5 Command pulse frequency:
1 V/1000 r/min.
6 Servomotor rotation speed:
1 V/250 r/min
7 Servomotor rotation speed:
1 V/125 r/min
8 to F Not used.
1 Analog
monitor
2 (NM)
alloca-
tion
0 to F Same as Pn003.0
2 to 3 Not
used.
0 (Do not change setting.)
Pn004 Not
used.
--- --- (Do not change setting.) 0000 --- --- ---
Pn005 Not
used.
--- --- (Do not change setting.) 0000 --- --- ---
Operation Chapter 4

 Loading...
Loading...





