4-21
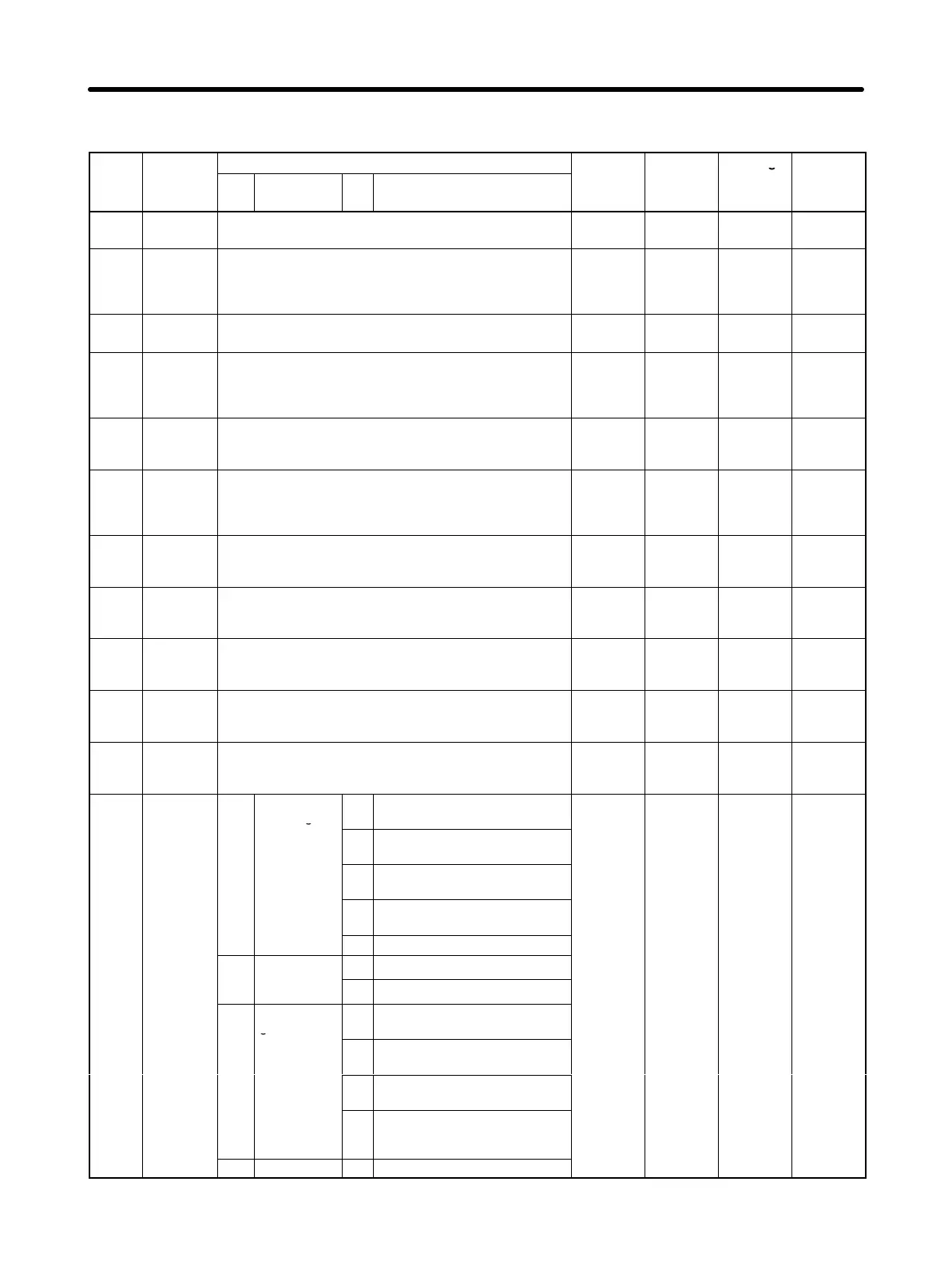
H Servo Gain Parameters (From Pn100)
Param- Parameter
Explanation (See note 1.)
Default
Unit Setting Restart
eter
No.
name
Digit
No.
Name Set-
ting
Explanation (See note 2.)
setting
range power?
Pn100 Speed
loop gain
Adjusts speed loop responsiveness. 80 Hz 1 to 2000 ---
Pn101 Speed
loop
integration
constant
Speed loop integral time constant 2000 x 0.01 ms 15 to
51200
---
Pn102 Position
loop gain
Adjusts position loop responsiveness. 40 1/s 1 to 2000 ---
Pn103 Inertia
ratio
Set using the ratio between the machine system inertia and
the Servomotor rotor inertia.
300 % 0 to
20000
(See note
3.)
---
Pn104 Speed
loop gain
2
Adjusts speed loop responsiveness (enabled by gain
switching input).
80 Hz 1 to 2000 ---
Pn105 Speed
loop
integration
constant 2
Speed loop integral time constant (enabled by gain
switching input).
2000 x 0.01 ms 15 to
51200
---
Pn106 Position
loop gain
2
Adjusts position loop responsiveness (enabled by gain
switching input).
40 1/s 1 to 2000 ---
Pn107 Bias
rotational
speed
Sets position control bias. 0 r/min 0 to 450 ---
Pn108 Bias
addition
band
Sets the position control bias operation start using deviation
counter pulse width.
7 Command
unit
0 to 250 ---
Pn109 Feed-for-
ward
amount
Position control feed-forward compensation value 0 % 0 to 100 ---
Pn10A Feed-for-
ward com-
mand filter
Sets position control feed-forward command filter. 0 x 0.01 ms 0 to 6400 ---
Pn10b Speed
control
0 P control
switching
0 Sets internal torque command
value conditions (Pn10C).
004 --- --- Yes
setting
conditions
1 Sets speed command value
conditions (Pn10d).
2 Sets acceleration command
value conditions (Pn10E)
3 Sets deviation pulse value
conditions (Pn10F)
4 No P control switching function
1 Speed
0 PI control
contro
oop
switching
1 IP control
2 Automatic
gain
0 Automatic gain switching
disabled
switching
selection **
1 Gain switching using position
commands
2 Gain switching using position
deviation
3 Gain switching using position
commands and position
deviation
3 Not used. 0 (Do not change setting.)
Operation Chapter 4

 Loading...
Loading...





