17
Laying EtherCAT Communications Cables
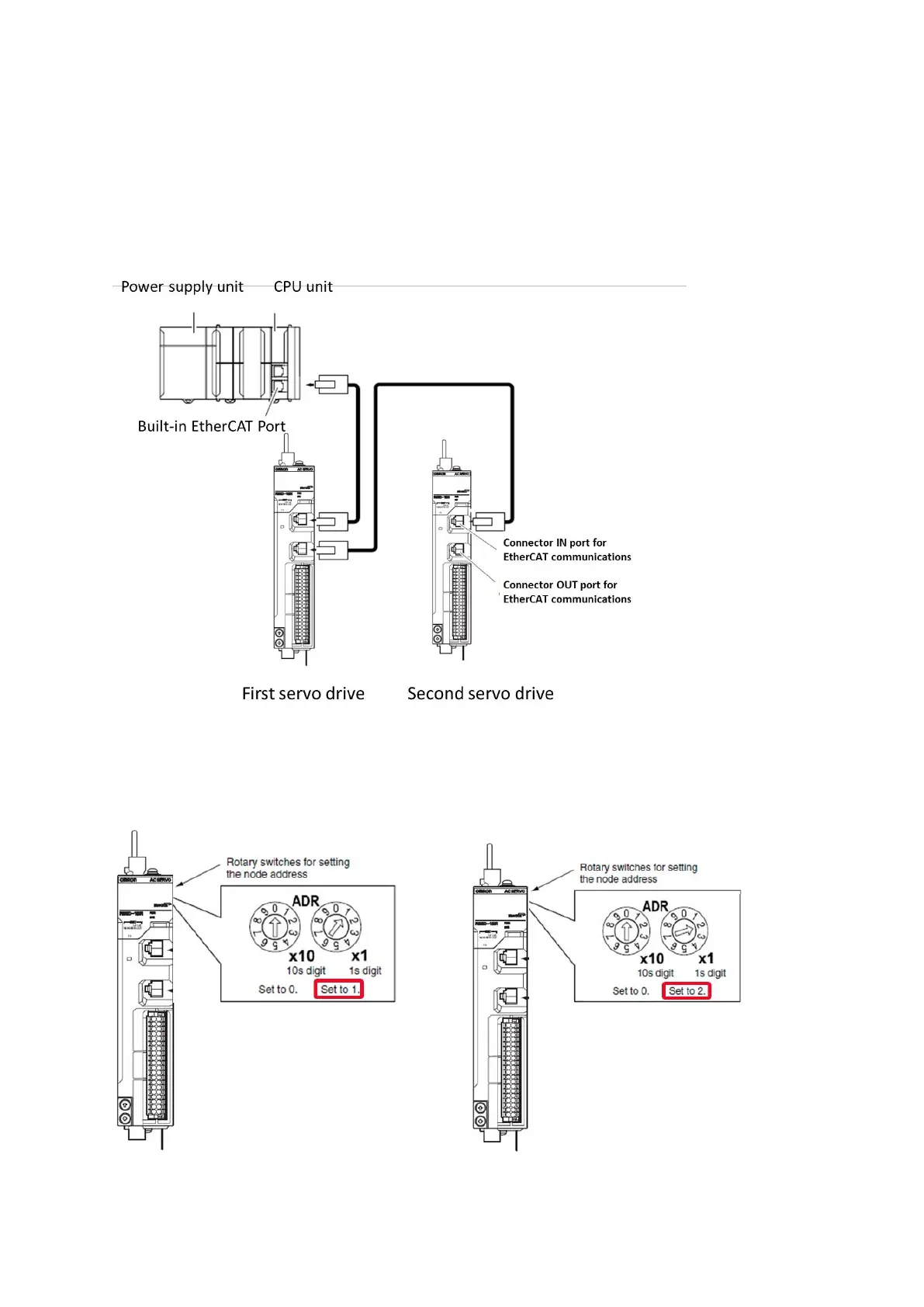
Connect the EtherCAT slave communications cables between the built-in EtherCAT port on the CPU Unit
and the EtherCAT slaves as shown in the following figure.
Connect the communications cable from the built-in EtherCAT port to the input port on the first slave, and
then connect the communications cable to the next slave to the output port on the first slave.
Do not connect anything to the output port of the slave at the end of the network.
Setting the Node Addresses of the Servo Drives
Set the node addresses of the Servo Drives as shown below.
 Loading...
Loading...


