6
EtherNet/IP Settings
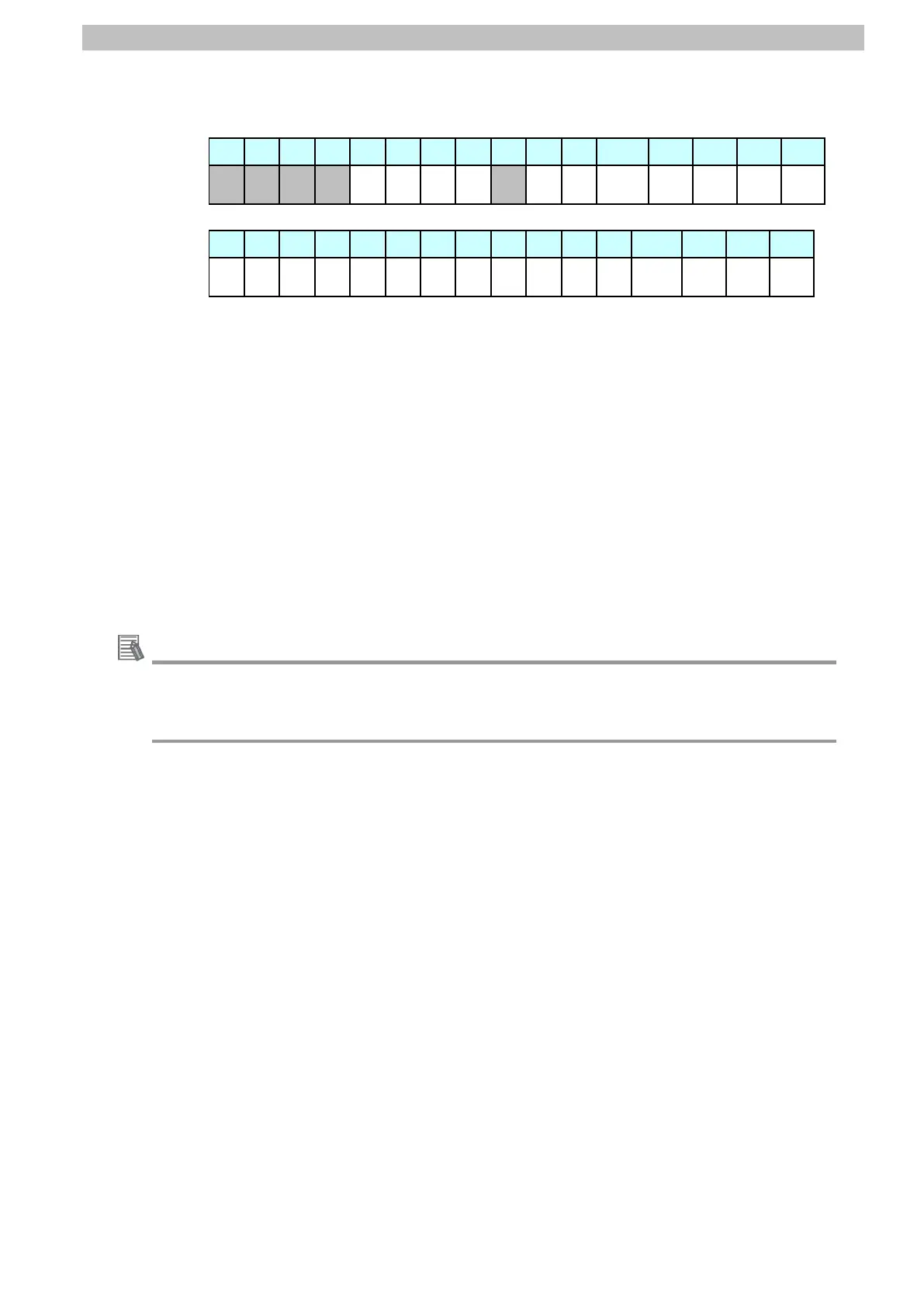
*2: Assignment of Sensor Head status signal2
Variable: EIPInput.SensorHeadStatusFlag2.F
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
STAT
STAT
STAT
STAT
OR
GATE
ENABLE
STABIL
ITY1
LIGHT
RESET
STAT
HOLD
STAT
31 30 29 28 27 26 25 24 23 22 21 20 19 18 17 16
LOW
_T4
PASS
_T4
HIGH
_T4
LOW
_T3
PASS
_T3
HIGH
_T3
LOW
_T2
PASS
_T2
HIGH
_T2
LOW
_T1
PASS
_T1
HIGH
_T1
STAT_
STAT_
STAT_
STAT_
HOSDSTAT : Hold execution status
RESETSTAT : Reset execution state
LIGHT : Logical beam lighting state
STABILITY1 : Measurement position
ENABLE : Measurement state
GATE : Data output completed
OR : Overall judgment result
TASKSTAT_Tn : TASK n TASK status (n: 1 to 4)
ZEROSTAT_Tn : TASK n Zero reset state (n: 1 to 4)
HIGH_Tn : TASK n HIGH output (n: 1 to 4)
PASS_Tn : TASK n PASS output (n: 1 to 4)
LOW_Tn : TASK n LOW output (n: 1 to 4)
For details on command and response codes, refer to Memory Assignments and Commands
in 4-1 EtherNet/IP Connection of the Displacement Sensor ZW-7000 series Confocal Fiber
Type Displacement Sensor User’s Manual for Communications Settings (Cat. No. Z363).
 Loading...
Loading...












