BASIC commands
PROGRAMMING MANUAL 154
Revision 1.0
/i
/i
3.2.205 N_ANA_IN
/i
3.2.206 N_ANA_OUT
/i
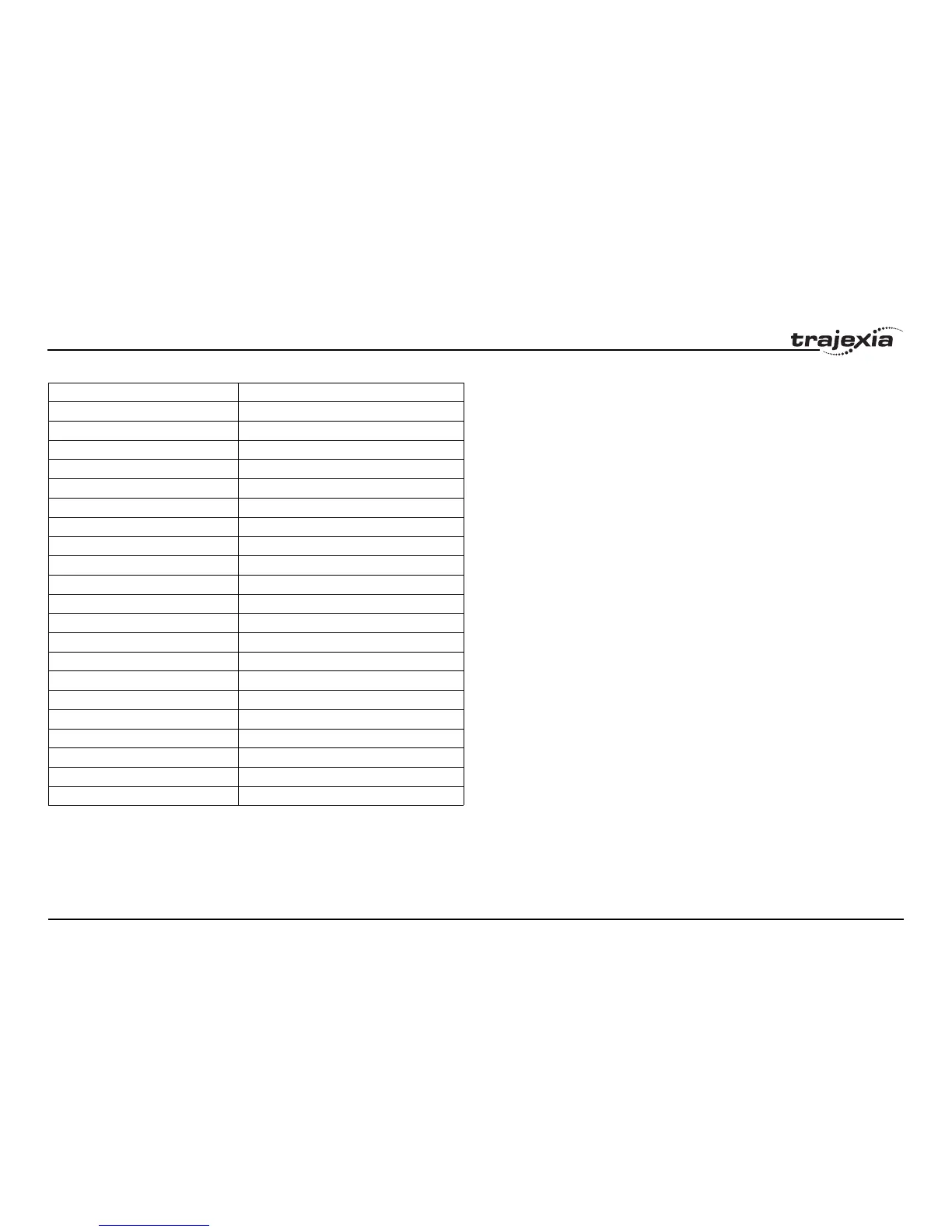
Move number Move type
0 IDLE (no move)
1 MOVE
2 MOVEABS
3 MHELICAL
4 MOVECIRC
5 MOVEMODIFY
6 MOVESP
7 MOVEABSSP
8 MOVECIRCSP
9 MHELICALSP
10 FORWARD
11 REVERSE
12 DATUM
13 CAM
14 JOG_FORWARD refer to FWD_JOG
15 JOG_REVERSE refer to REV_JOG
20 CAMBOX
21 CONNECT
22 MOVELINK
30 MOVETANG
31 MSPHERICAL
MTYPE can be used to determine whether a move has finished or if a transi-
tion from one move type to another has taken place.
A non-idle move type does not necessarily mean that the axis is actually
moving. It can be at 0 speed part way along a move or interpolating with
another axis without moving itself.
Arguments N/A
Example No example.
See also AXIS, NTYPE.
Type System parameter (read-only)
Syntax N_ANA_IN
Description This parameter returns the number of analogue input channels connected on
the MECHATROLINK-II expansion bus. For example a TJ2-MC64 will return
8 if there are 2 x AN2900 Units connected as each has 4 analogue input
channels.
Arguments N/A
Example No example.
See also N/A
Type System parameter (read-only)
Syntax N_ANA_OUT
Description This parameter returns the number of analogue output channels connected
on the MECHATROLINK-II expansion bus. For example a TJ2-MC64 will
return 4 if there are 2 x AN2910 Units connected as each has 4 analogue
input channels.
Arguments N/A
Example No example.
See also N/A