BASIC commands
PROGRAMMING MANUAL 31
Revision 1.0
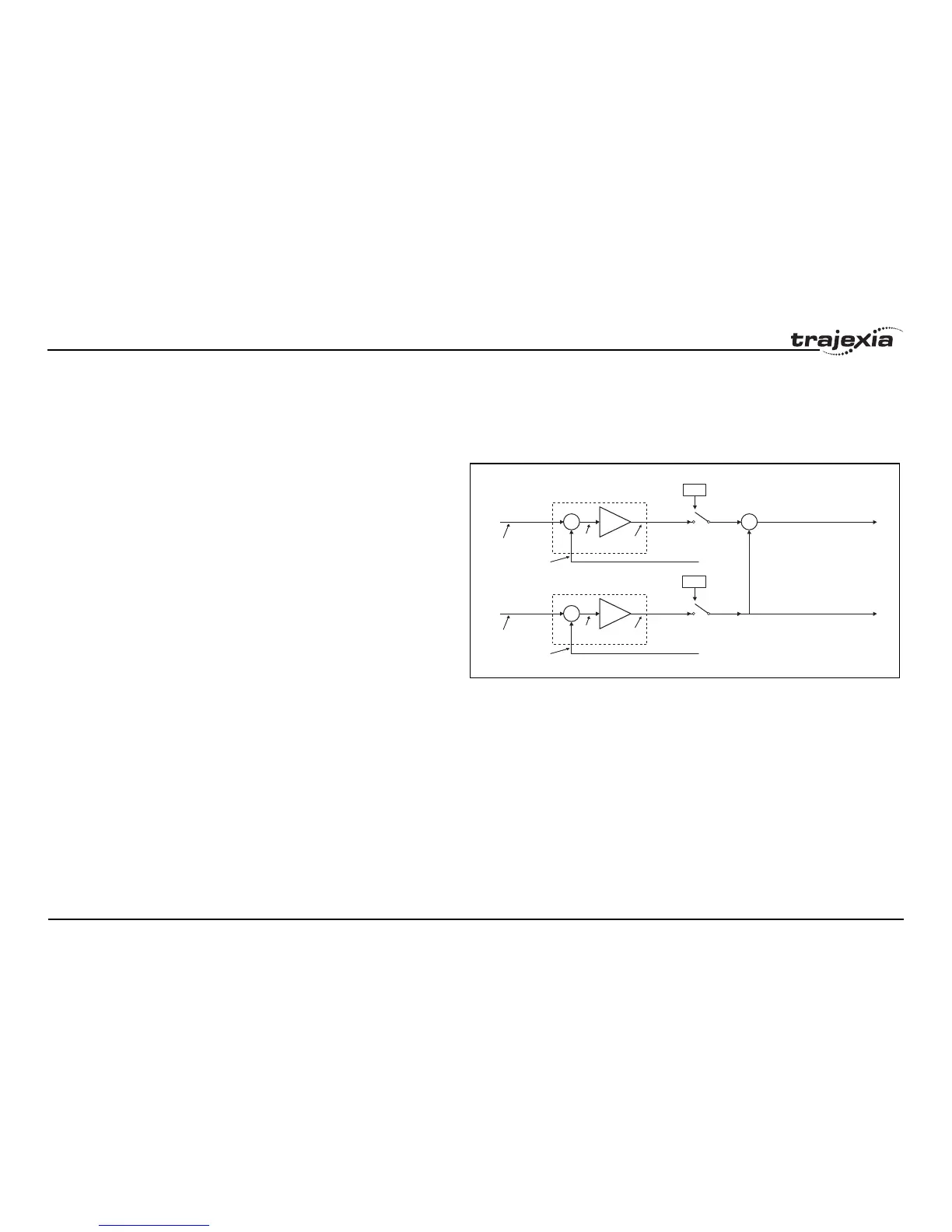
3.2.21 ADD_DAC
/i
fig. 1/i
Type Axis command
Syntax ADD_DAC(axis)
+
_
SERVO = OFF
SERVO = ON
Final speed reference in AXIS(n) =
DAC_OUT AXIS(m) + DAC_OUT AXIS(n)
ADD_DAC(n) AXIS(m):
+
+
AXIS m
Position loop
Demanded
position
Measured
position
Following
error
Speed
command
+
_
SERVO = OFF
SERVO = ON
AXIS n
Position loop
Demanded
position
Measured
position
Following
error
Speed
command
DAC
DAC
Description The ADD_DAC command adds the DAC_OUT value of axis to the
DAC_OUT value of the base axis. Use ADD_DAC(-1) to cancel the sum.
ADD_DAC works on the default basis axis (set with BASE) unless AXIS is
used to specify a temporary base axis.
Note:
1. Be aware that the control loop gains for both axes need to be determined
with care. As different encoders with different resolutions are used, the
gains are not identical.
2. Set the OUTLIMIT parameter to the same value for both linked axes.
3. This command has no meaning for a MECHATROLINK-II axis in position
mode (ATYPE=40), because the value of DAC_OUT is ignored.
Arguments • axis
The axis from which to sum the speed reference output to the base axis.
Set the argument to -1 to cancel the link and return to normal operation.
Example No example.
See also AXIS, DAC_OUT, OUTLIMIT