BASIC commands
PROGRAMMING MANUAL 25
Revision 1.0
3.1.12 Task commands and parameters
/i
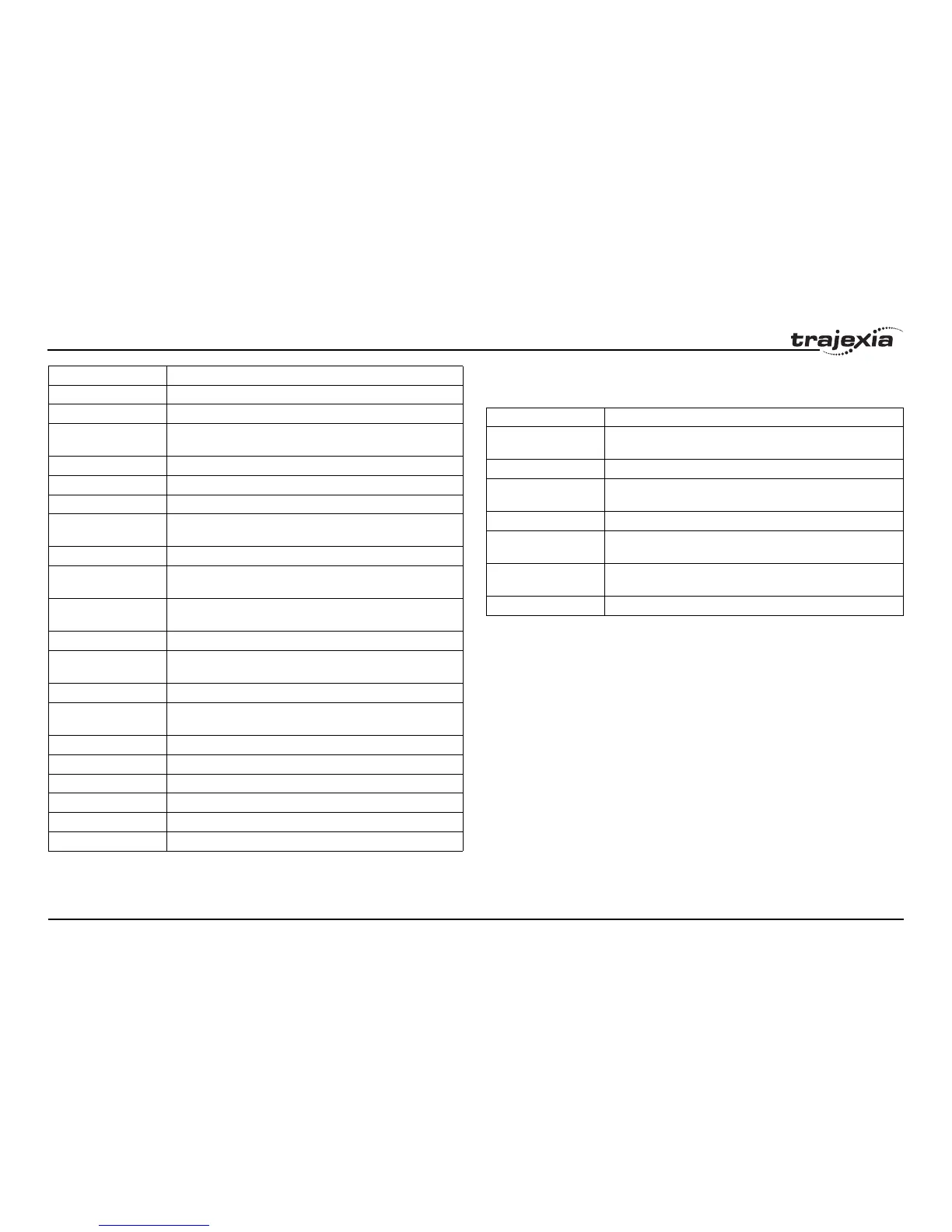
DATE Sets or returns the current date held by the real time clock.
DAY Sets or returns the current day.
DISPLAY Determines I/O channels to be displayed on the front panel
LEDs.
ERROR_AXIS Contains the number of the axis which caused the motion error.
FRAME Specifies operating frame for frame transformations.
LAST_AXIS Contains the number of the last axis processed by the system.
LIMIT_BUFFERED Contains the maximum number of move buffers available in the
system.
MOTION_ERROR Contains an error flag for axis motion errors.
N_ANA_IN Returns the number of analogue inputs connected on the
MECHATROLINK-II bus.
N_ANA_OUT Returns the number of analogue outputs connected on the
MECHATROLINK-II bus.
NEG_OFFSET Applies a negative offset to the DAC signal from the servo loop.
NIO Contains the number of inputs and outputs connected to the
system.
POS_OFFSET Applies a positive offset to the DAC signal from the servo loop.
SCOPE_POS Contains the current TABLE position at which the SCOPE com-
mand is currently storing its first parameter.
SERVO_PERIOD Sets the servo cycle period of the TJ2-MC64.
SYSTEM_ERROR Contains the system errors since the last initialization.
TIME Returns the current time held by the real time clock.
TSIZE Returns the size of the currently defined Table.
VERSION Returns the version number of the controller firmware.
WDOG The software switch that enables Servo Drives.
Name Description
Name Description
ERROR_LINE Contains the number of the line which caused the last BASIC
program error.
PMOVE Contains the status of the task buffers.
PROC Lets a process parameter from a particular process to be
accessed.
PROC_STATUS Returns the status of the process specified.
PROCNUMBER Contains the number of the task in which the currently selected
program is running.
RUN_ERROR Contains the number of the last BASIC error that occurred on the
specified task.
TICKS Contains the current count of the task clock pulses.