BASIC commands
PROGRAMMING MANUAL 19
Revision 1.0
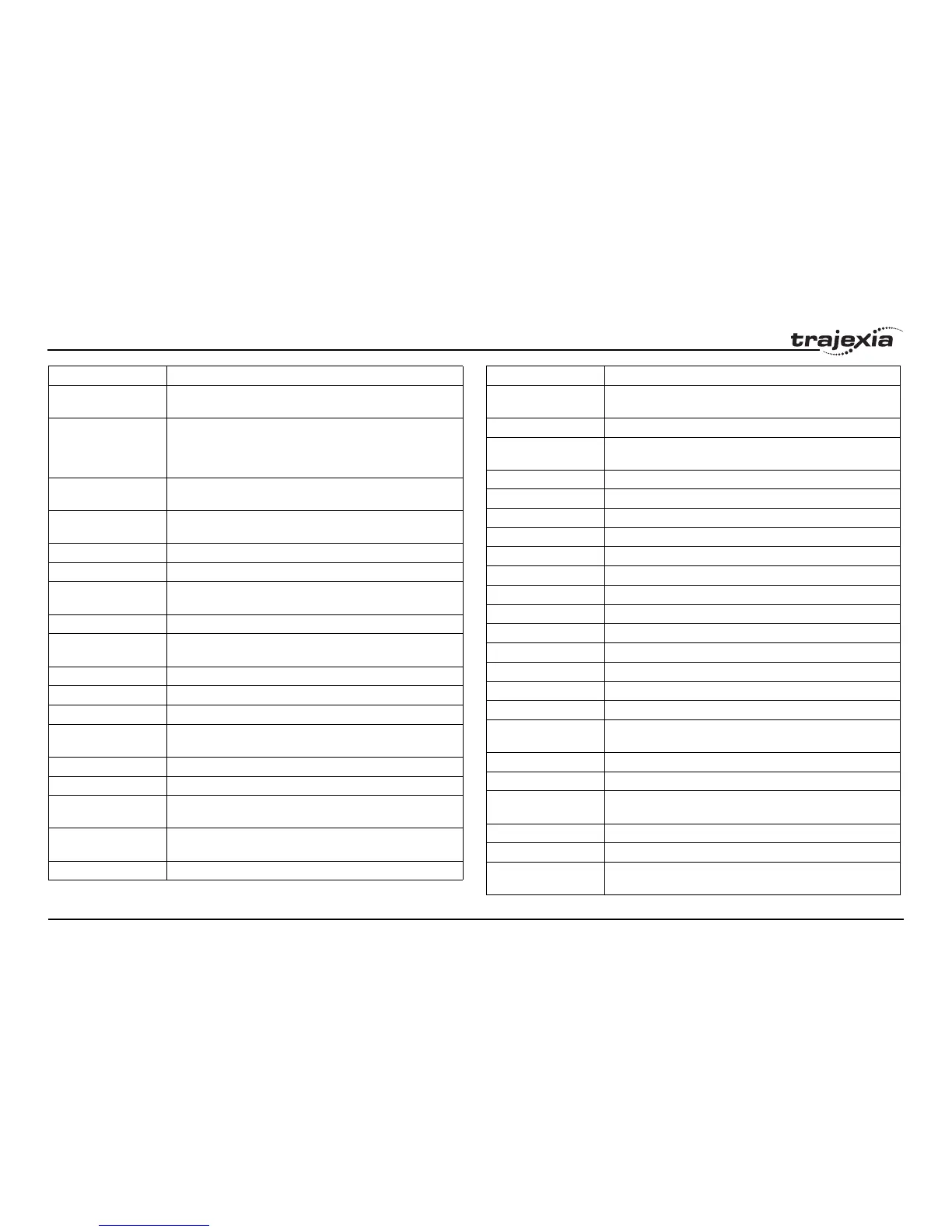
DPOS Contains the demand position generated by the move com-
mands.
DRIVE_CONTROL Selects data to be monitored using DRIVE_MONITOR for axes
connected via the MECHATROLINK-II bus. For axes connected
via the TJ1-FL02, DRIVE_CONTROL sets outputs of the TJ1-
FL02.
DRIVE_INPUTS Holds I/O data of the Drive connected to MECHATROLINK-II
bus. Data is updated every servo cycle.
DRIVE_MONITOR Monitors data of the Servo Drive connected to MECHATRO-
LINK-II bus. Data are updated every servo cycle.
DRIVE_STATUS Contains the current status of the Servo Drive.
ENCODER Contains a raw copy of the encoder hardware register.
ENCODER_BITS Sets the number of bits for the absolute encoder connected to
TJ1-FL02.
ENCODER_CONTROL Controls operating mode of the EnDat absolute encoder.
ENCODER_ID Returns the ID value of the absolute encoder connected to TJ1-
FL02.
ENCODER_RATIO Sets scaling value for incoming encoder counts.
ENCODER_STATUS Returns the status of the Tamagawa absolute encoder.
ENCODER_TURNS Returns the multi-turn count of the absolute encoder.
END_DIR_LAST Defines the end direction in radians of the last programmed
forced speed move of 2 or more axes.
ENDMOVE Holds the position of the end of the current move.
ENDMOVE_BUFFER Holds the absolute position at the end of the buffered sequence.
ENDMOVE_SPEED Contains the ramp to exit speed when forced speed moves are
loaded.
ERRORMASK Contains the mask value that determines if MOTION_ERROR
occurs depending on the axis status.
FAST_JOG Contains the input number to be used as the fast jog input.
Name Description
FASTDEC Defines ramp to zero deceleration ratio when an axis limit switch
or position is reached.
FE Contains the Following Error.
FE_LATCH Contains the FE value which caused the axis to put controller in
MOTION_ERROR state.
FE_LIMIT Contains the maximum allowable Following Error.
FE_LIMIT_MODE Defines how FE influences MOTION_ERROR state.
FE_RANGE Contains the Following Error warning range limit.
FHOLD_IN Contains the input number to be used as the feedhold input.
FHSPEED Contains the feedhold speed.
FORCE_SPEED Contains the speed when forced speed moves are loaded.
FS_LIMIT Contains the absolute position of the forward software limit.
FULL_SP_RADIUS Contains the full speed radius in user UNITS.
FWD_IN Contains the input number to be used as a forward limit input.
FWD_JOG Contains the input number to be used as a jog forward input.
I_GAIN Contains the integral control gain.
INVERT_STEP Switches a hardware Inverter into the stepper output circuit.
JOGSPEED Sets the jog speed.
LIMIT_BUFFERED Contains the maximum number of move buffers available in the
controller.
MARK Detects the primary registration event on a registration input.
MARKB Detects the secondary registration event on a registration input.
MERGE Is a software switch that can be used to enable or disable the
merging of consecutive moves.
MOVES_BUFFERED Holds the number of moves being buffered by the axis.
MPOS Is the position of the axis as measured by the encoder.
MSPEED Represents the change in the measured position in the last
servo period.
Name Description