BASIC commands
PROGRAMMING MANUAL 20
Revision 1.0
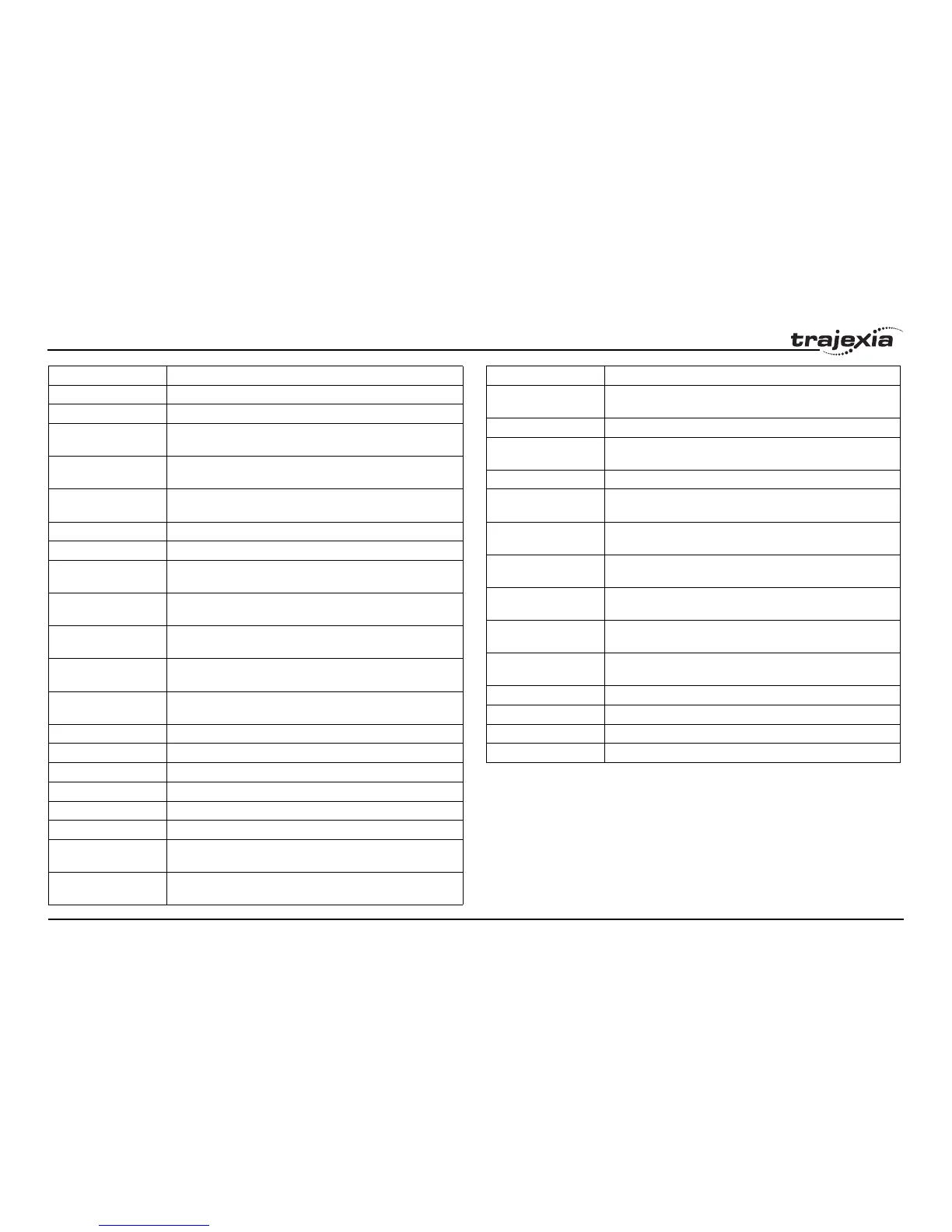
MTYPE Contains the type of move currently being executed.
NTYPE Contains the type of the move in the Next Move buffer.
OFFPOS Contains an offset that will be applied to the demand position
without affecting the move in any other way.
OPEN_WIN Defines the beginning of the window in which a registration
mark is expected.
OUTLIMIT Contains the limit that restricts the speed reference output from
the TJ2-MC64.
OV_GAIN Contains the output velocity control gain.
P_GAIN Contains the proportional control gain.
RAISE_ANGLE Defines the angle change in radians above which an X-Y sys-
tem will interact with a BASIC program.
REG_POS Contains the position at which the (primary) registration event
occurred.
REG_POSB Contains the position at which the secondary registration event
occurred.
REGIST_SPEED Contains the speed when the (primary) registration event
occurred.
REGIST_SPEEDB Contains the speed when the secondary registration event
occurred.
REMAIN Is the distance remaining to the end of the current move.
REP_DIST Contains or sets the repeat distance.
REP_OPTION Controls the application of the REP_DIST axis parameter.
REV_IN Contains the input number to be used as a reverse limit input.
REV_JOG Contains the input number to be used as a jog reverse input.
RS_LIMIT Contains the absolute position of the reverse software limit.
S_REF Contains the speed reference value which is applied when the
axis is in open loop.
S_REF_OUT Contains the speed reference value being applied to the Servo
Drive for both open as closed loop.
Name Description
SERVO Determines whether the axis runs under servo control or open
loop.
SPEED Contains the demand speed in units/s.
SPEED_SIGN Configures the voltage range of the analog speed reference out-
put of the TJ1-FL02.
SRAMP Contains the S-curve factor.
START_DIR_LAST Defines the start direction in radians of the last programmed
forced speed move of 2 or more axes.
STOP_ANGLE Defines the angle change in radians above which an X-Y sys-
tem should decelerate to zero speed.
T_REF Contains the torque reference value which is applied to the
servo motor.
TABLE_POINTER Parmeter to determine which TABLE memory location is cur-
rently being used by the CAM.
TANG_DIRECTION Parameter returns the angle in radians that represents the vec-
tor direction of the interpolated axes.
TRANS_DPOS Contains axis demand position at output of frame transforma-
tion.
UNITS Contains the unit conversion factor.
VECTOR_BUFFERED Holds the total vector length of the buffered moves.
VFF_GAIN Contains the speed feed forward control gain.
VP_SPEED Contains the speed profile speed.
Name Description