BASIC commands
PROGRAMMING MANUAL 160
Revision 1.0
3.2.221 OUTDEVICE
/i
/i
/i
3.2.222 OUTLIMIT
/i
3.2.223 OV_GAIN
/i
Type Communication parameter
Syntax OUTDEVICE
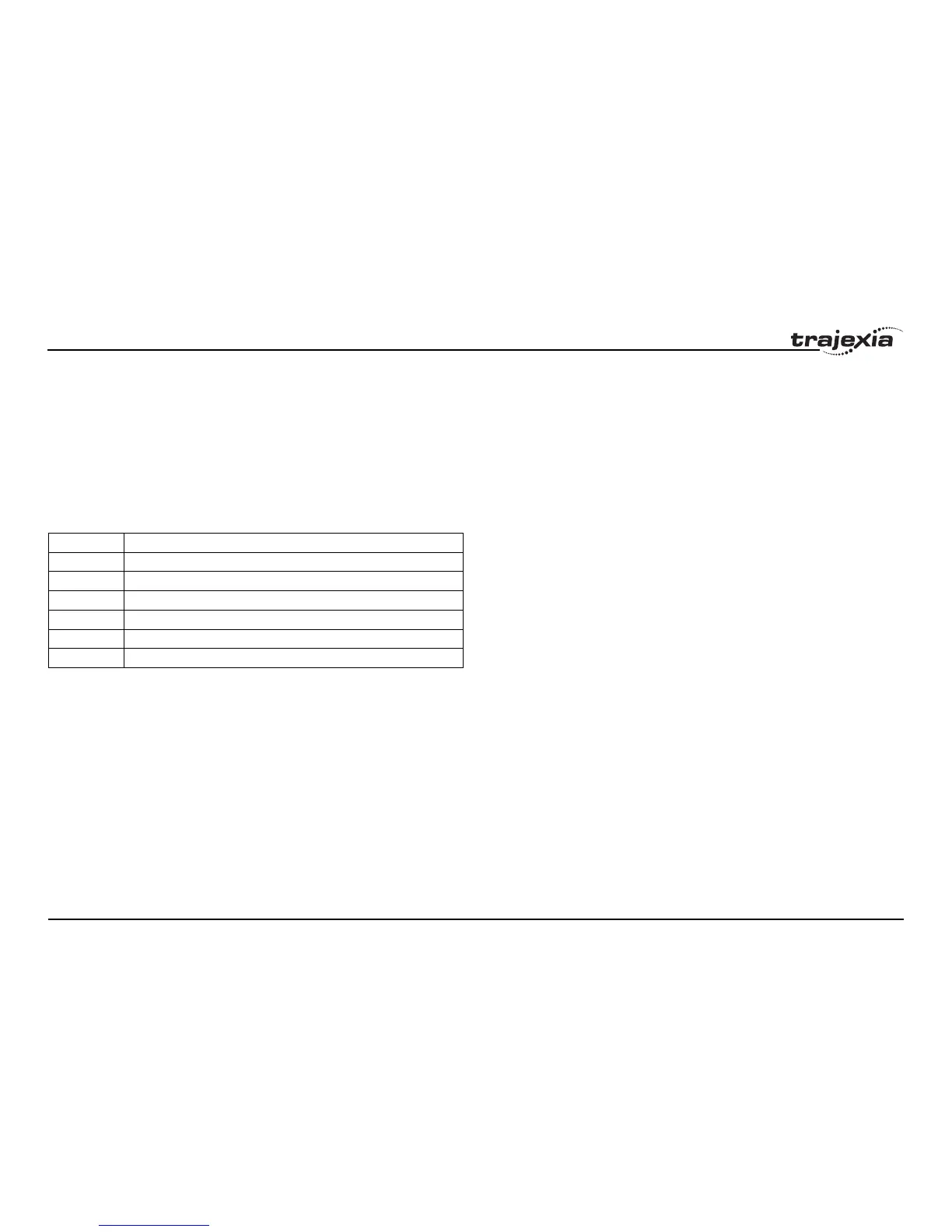
Description The OUTDEVICE parameter defines the default output device. This device
will be selected for the PRINT command when the #n option is omitted. The
OUTDEVICE parameter is task specific. The supported values are listed in
the table below.
Value Description
0 Programming port 0 (default)
1 RS-232C serial port 1
2 RS-422A/485 serial port 2
5 Trajexia Studio port 0 user channel 5
6 Trajexia Studio port 0 user channel 6
7 Trajexia Studio port 0 user channel 7
Arguments N/A
Example No example.
See also PRINT, INDEVICE.
Type Axis parameter
Syntax OUTLIMIT
Description The output limit restricts the demand output from a servo axis to a lower value
than the maximum. The value required varies depending on the maximum
demand output possible. If the voltage output is generated by a 16 bit DAC
values an OUTLIMIT of 32767 will produce the full +/-10v range. A MECHA-
TROLINK-II speed axis has a 32 bit maximum demand.
Note: OUTLIMIT only makes sense for Axis types using speed reference.
Arguments N/A
Example OUTLIMIT AXIS(1) = 16384
The above will limit the voltage output to a +/-5V output range from the TJ1-
FL02 unit. This will apply to the DAC command if SERVO=OFF, or to the volt-
age output by the servo loop if SERVO=ON.
See also AXIS, S_REF, S_REF_OUT, SERVO.
Type Axis parameter
Syntax OV_GAIN
Description The OV_GAIN parameter contains the output velocity gain. The output veloc-
ity output contribution is calculated by multiplying the change in measured
position with the OV_GAIN parameter value. The default value is 0.
Adding NEGATIVE output velocity gain to a system is mechanically equivalent
to adding damping. It is likely to produce a smoother response and allow the
use of a higher proportional gain than could otherwise be used, but at the
expense of higher Following Errors. High values may cause oscillation and
produce high Following Errors.
Note: Negative values are normally required for OV_GAIN.
Note: In order to avoid any instability the servo gains should be changed only
when the SERVO is off.
Arguments N/A
Example No example.
See also D_GAIN, I_GAIN, P_GAIN, VFF_GAIN.