BASIC commands
PROGRAMMING MANUAL 168
Revision 1.0
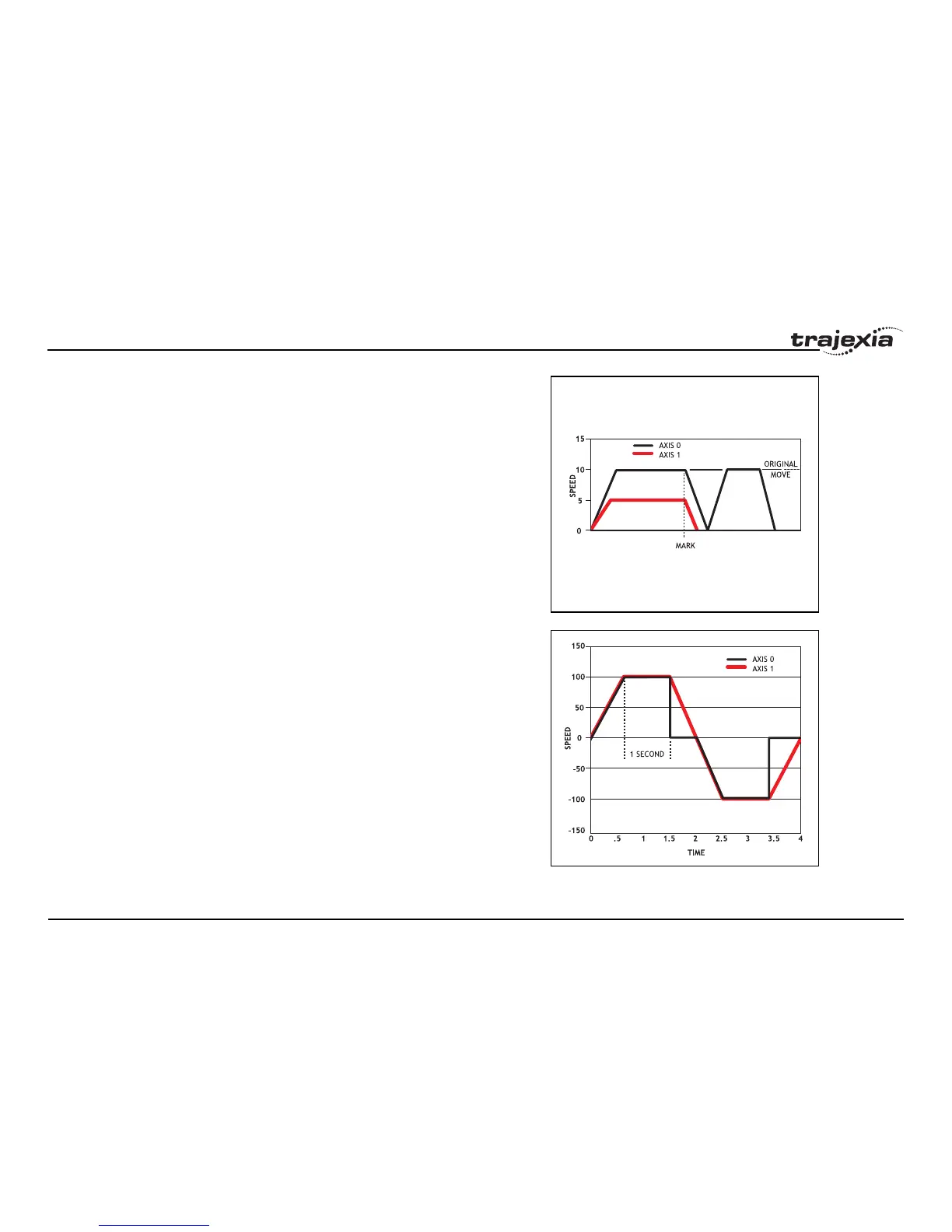
fig. 55/i
fig. 56/i
Example This example shows the use of RAPIDSTOP to cancel a MOVE on the main
axis and a FORWARD on the second axis. When the axes have stopped, a
MOVEABS is applied to re-position the main axis.
BASE(0)
REGIST(3)
FORWARD AXIS(1)
MOVE (100000) 'apply a long move
WAIT UNTIL MARK
RAPIDSTOP
WAIT IDLE 'for MOVEABS to be accurate, the axis must stop
MOVEABS(3000)
Example This example shows the use of RAPIDSTOP to break a CONNECT and stop
the motion. The connected axis stops immediately on the RAPIDSTOP com-
mand. The forward axis decelerates at the DECEL value.
BASE(0)
CONNECT(1,1)
FORWARD AXIS(1)
WAIT UNTIL VPSPEED=SPEED 'let the axis get to full speed
WA(1000)
RAPIDSTOP
WAIT IDLE AXIS(1) 'wait for axis 1 to decel
CONNECT(1,1) 're-connect axis 0
REVERSE AXIS(1)
WAIT UNTIL VPSPEED=SPEED
WA(1000)
RAPIDSTOP
WAIT IDLE AXIS(1)
See also CANCEL, MTYPE, NTYPE.