BASIC commands
PROGRAMMING MANUAL 192
Revision 1.0
3.2.280 STOP_ANGLE
/i
3.2.281 SYSTEM_ERROR
/i
/i
/i
Arguments • program_name
The name of the program to be stopped.
• task_number
The number of the task with the program to be stopped. Range: [2,21].
Example >> STOP progname
Example The lines from label on will not be executed in this example.
STOP
label:
PRINT var
RETURN
See also HALT, RUN, SELECT.
Type Axis parameter
Syntax STOP_ANGLE
Description Used to define the angle change in radians above which an X-Y system
should decelerate to zero speed. Operation of STOP_ANGLE applies to
MOVESP/MOVEABSSP/MOVECIRCSP and depends on setting of
DECEL_ANGLE and CORNER_MODE. If the X-Y system turns through an
angle between STOP_ANGLE and DECEL_ANGLE the system will slow
down to an intermediate speed.
Arguments N/A
Example ' Stop above 25 deg (0.4363 rad)
STOP_ANGLE = 0.4363
See also RAISE_ANGLE
Type System parameter (read only)
Syntax SYSTEM_ERROR
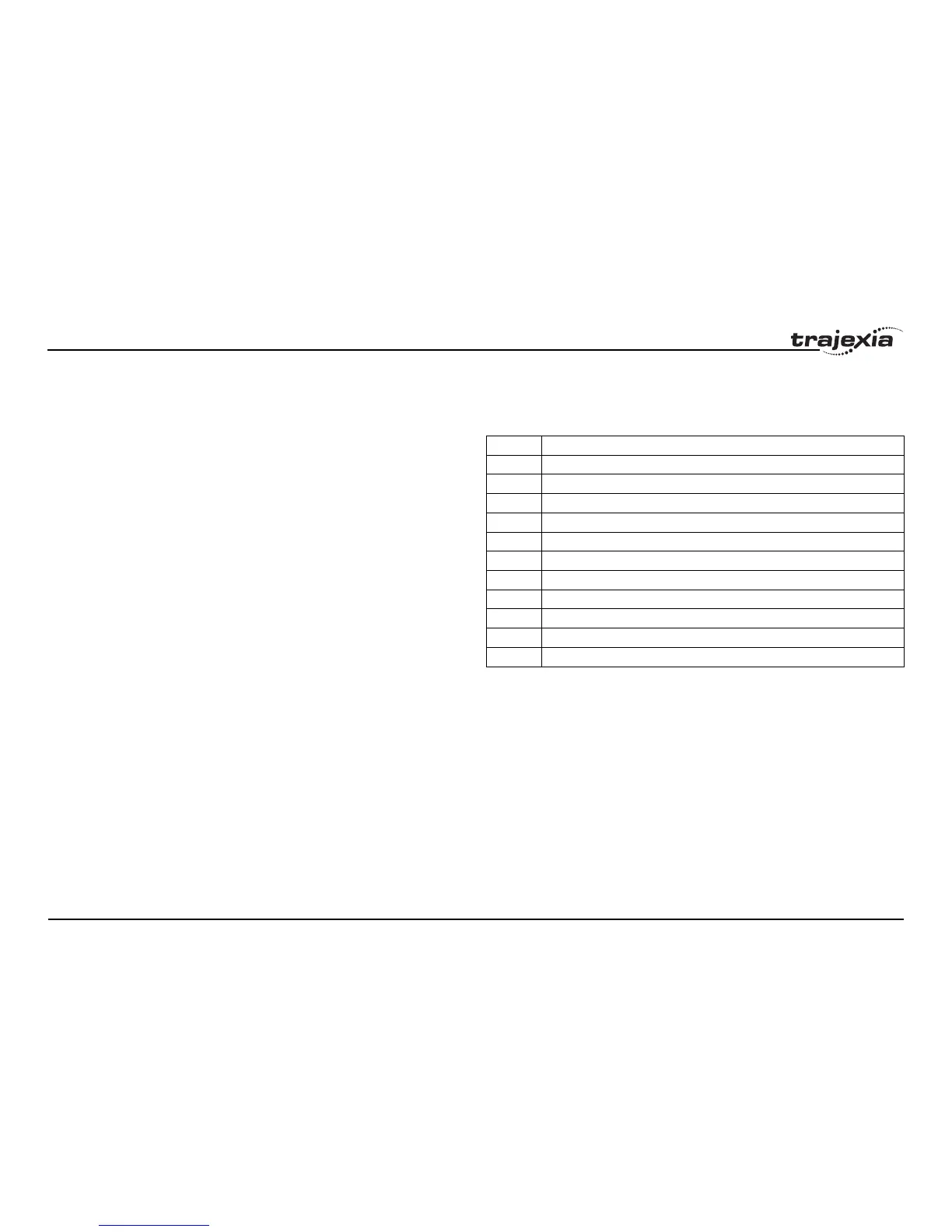
Description The SYSTEM_ERROR parameter contains system errors that occurred in the
TJ2 system since the last time it was initialized. The bits in the
SYSTEM_ERROR parameter are given in the table below.
Bit Description
0 SRAM memory error
1 Battery low error
2 - 7 Reserved for future use
8 Configuration unit error (Any unit in the system)
9 Configuration device error (Any device in the system)
10 - 15 Reserved for future use
16 Unit lost error (Any unit in the system)
17 Terminator not fitted / too many units connected
18 Device lost error (Any device in the system)
19 Unsupported unit (Any unit in the system)
20 Device error (Any device in the system)
Arguments N/A.
Example No example.
See also N/A