Communication protocols
PROGRAMMING MANUAL 207
Revision 1.0
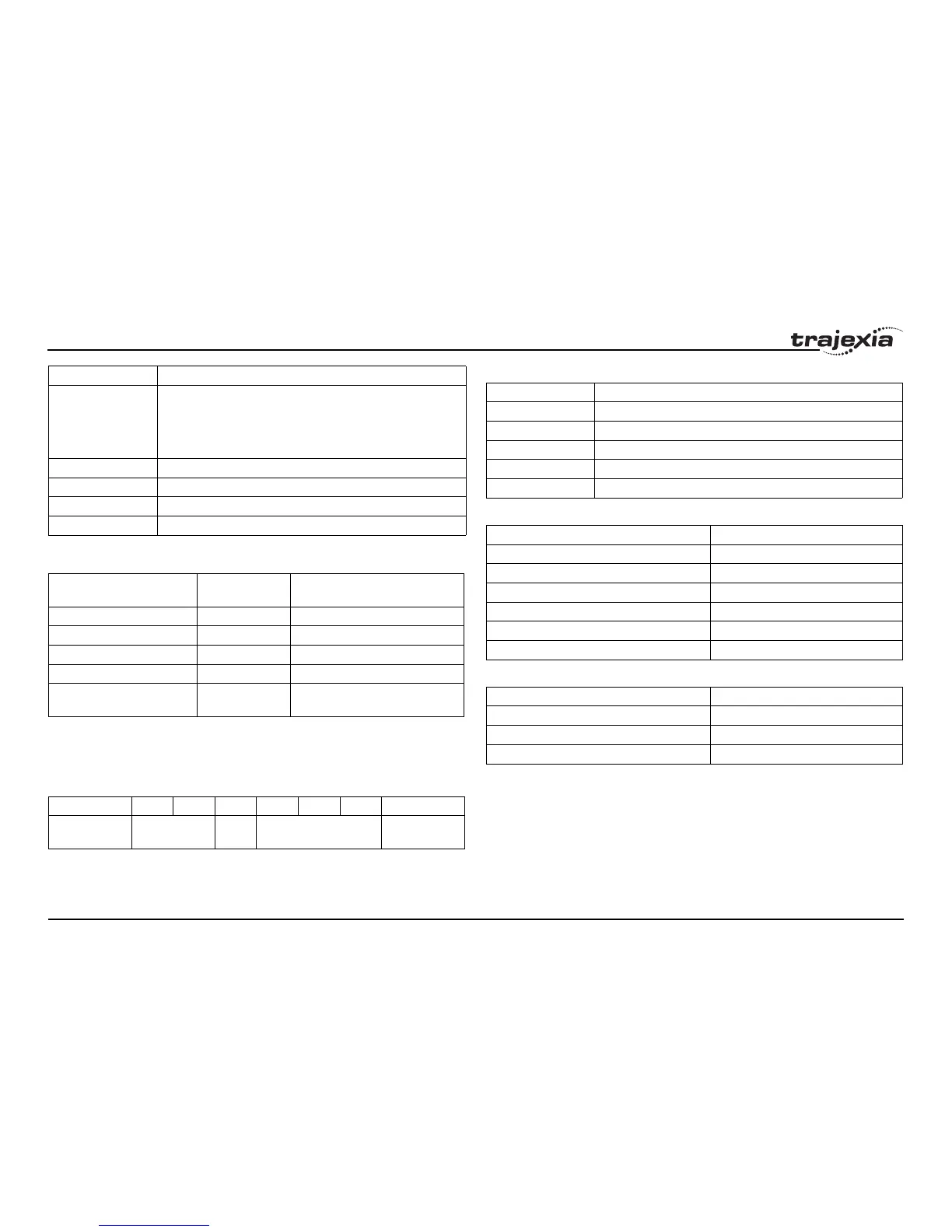
The TJ2-MC64 responds with these codes:
/i
General Purpose Read command (2001)
The FINS General Purpose read command has this format:
/i
The parameters can have the following values:
/i
/i
/i
Example:
Read VR in 64 bit IEEE Floating point format: var_type = 0xE2
When reading axis parameters (for the offsets see the table below):
• xx = axis number
• yy = axis parameter offset (Most significant byte)
• zz = axis parameter offset (Least significant byte)
When reading VR or TABLE:
var_type • 82 (TABLE memory in 16-bit integer format)
• C2 (TABLE memory in 32-bit IEEE floating-point format)
• B0 (VR memory in 16-bit integer format)
• F0 (VR memory in 32-bit IEEE floating-point format)
• 30 (VR memory in bit format)
start_address 0 <= start_address <= number of variables - 1 <= FFFF
total_words 1 <= total_words <= memory size - start_address + 1
total_bits 1
bit 00 or 01
Condition Response code
(hex)
Description
All elements valid 0000 OK
Var_type invalid 1101 No area type
Start_address invalid 1103 Address range designation error
Bit_number invalid 1103 Address range designation error
Number of elements invalid
(totals)
1104 Address out of range
20 01 00 00 .. xx yy zz .. ..
command_code parameter var_
type
start_address element_count
Parameter Values
Parameter Values (hex)
command_code 20 01
parameter 00 00
var_type See table below
start_address See definition below
element_count 1 <= element_count <= number of variables - start_address
var_type (upper 4 bits) Values (hex)
Unsigned Integer 16 bits 0
Unsigned Integer 32 bits 1
Integer 16 bits 8
Integer 32 bits 9
Floating point 32 bits D
Floating point 64 bits E
var_type (lower 4 bits) Values (hex)
Axis parameters 1
VR memory 2
TABLE memory 3