Communication protocols
PROGRAMMING MANUAL 209
Revision 1.0
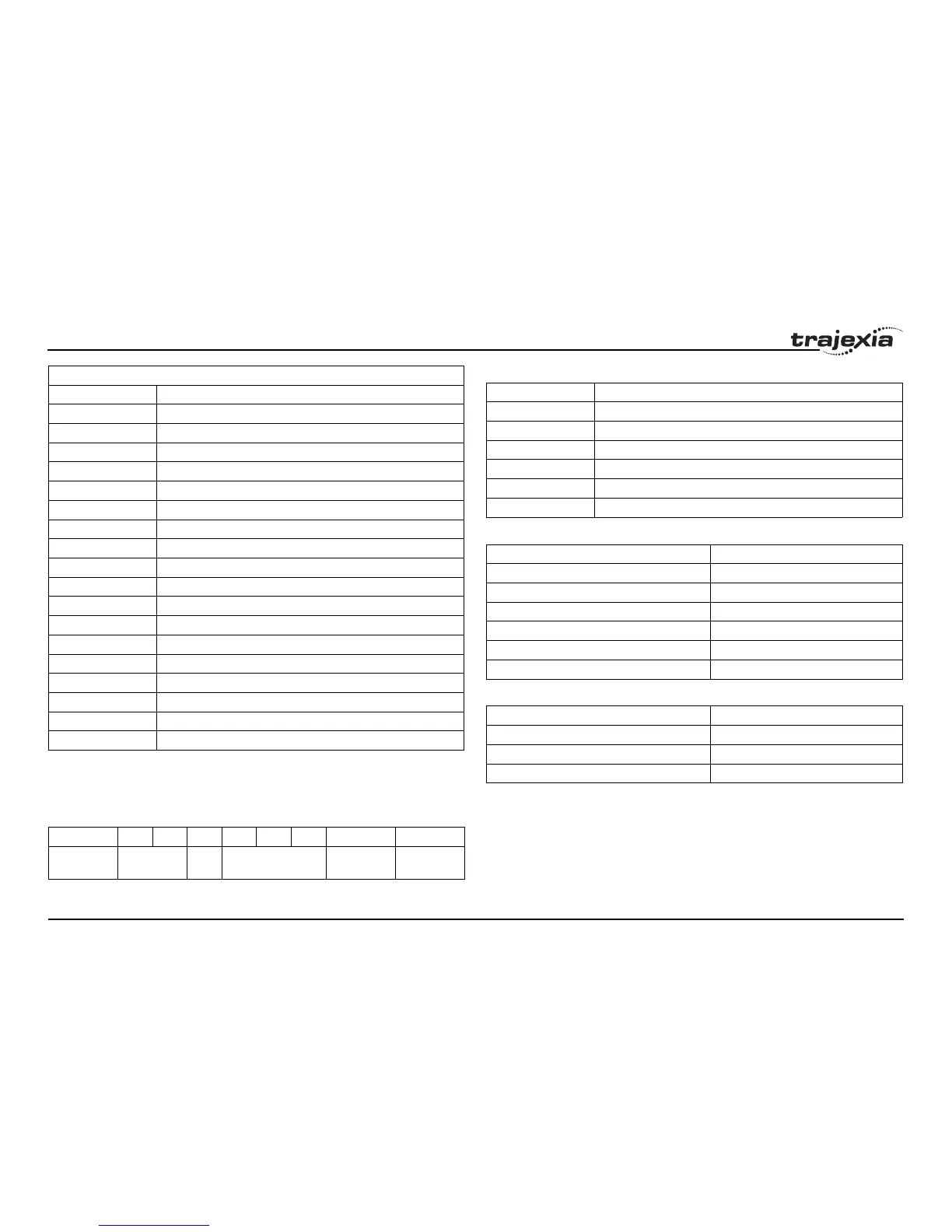
General Purpose Write command (2002)
The FINS General Purpose write command has this format:
/i
The parameters can have the following values:
/i
/i
/i
Example:
Write VR in 64 bit IEEE Floating point format: var_type = 0xE2
When writing axis parameters (for the offsets see the table at the General
Purpose Read command):
• xx = axis number
• yy = axis parameter offset (Most significant byte)
• zz = axis parameter offset (Least significant byte)
30 MARK
31 MPOS
32 MSPEED
33 MTYPE
34 NTYPE
35 OV_GAIN
36 P_GAIN
37 REG_POS
38 REMAIN
39 REP_DIST
40 REP_OPTION
41 REV_IN
42 RS_LIMIT
43 SERVO
44 SPEED
45 TRANS_DPOS
46 VFF_GAIN
47 VP_SPEED
20 02 00 00 .. xx yy zz .. .. .. ..
command_
code
parameter var_
type
start_address total_bytes write_data
Axis parameters offsets
Offset Axis parameter
Parameter Values (hex)
command_code 20 02
parameter 00 00
var_type See table below
start_address See definition below
total_bytes 1 <= element_count <= number of variables - start_address
write_data Data to be written
var_type (upper 4 bits) Values (hex)
Unsigned Integer 16 bits 0
Unsigned Integer 32 bits 1
Integer 16 bits 8
Integer 32 bits 9
Floating point 32 bits D
Floating point 64 bits E
var_type (lower 4 bits) Values (hex)
Axis parameters 1
VR memory 2
TABLE memory 3