Examples and tips
PROGRAMMING MANUAL 259
Revision 1.0
However, the user must be aware that not only the UNITS axis parameter
matters in the conversion between encoder counts and user defined units.
Certain Servo Driver parameters and some characteristics of the mechanical
system are also important. The following sections describe which Servo
Driver parameters are important for this conversion. We also give examples
of how to set those parameters and the UNITS axis parameter, taking the
characteristics of the mechanical system into account.
Conversion between encoder counts and user defined units
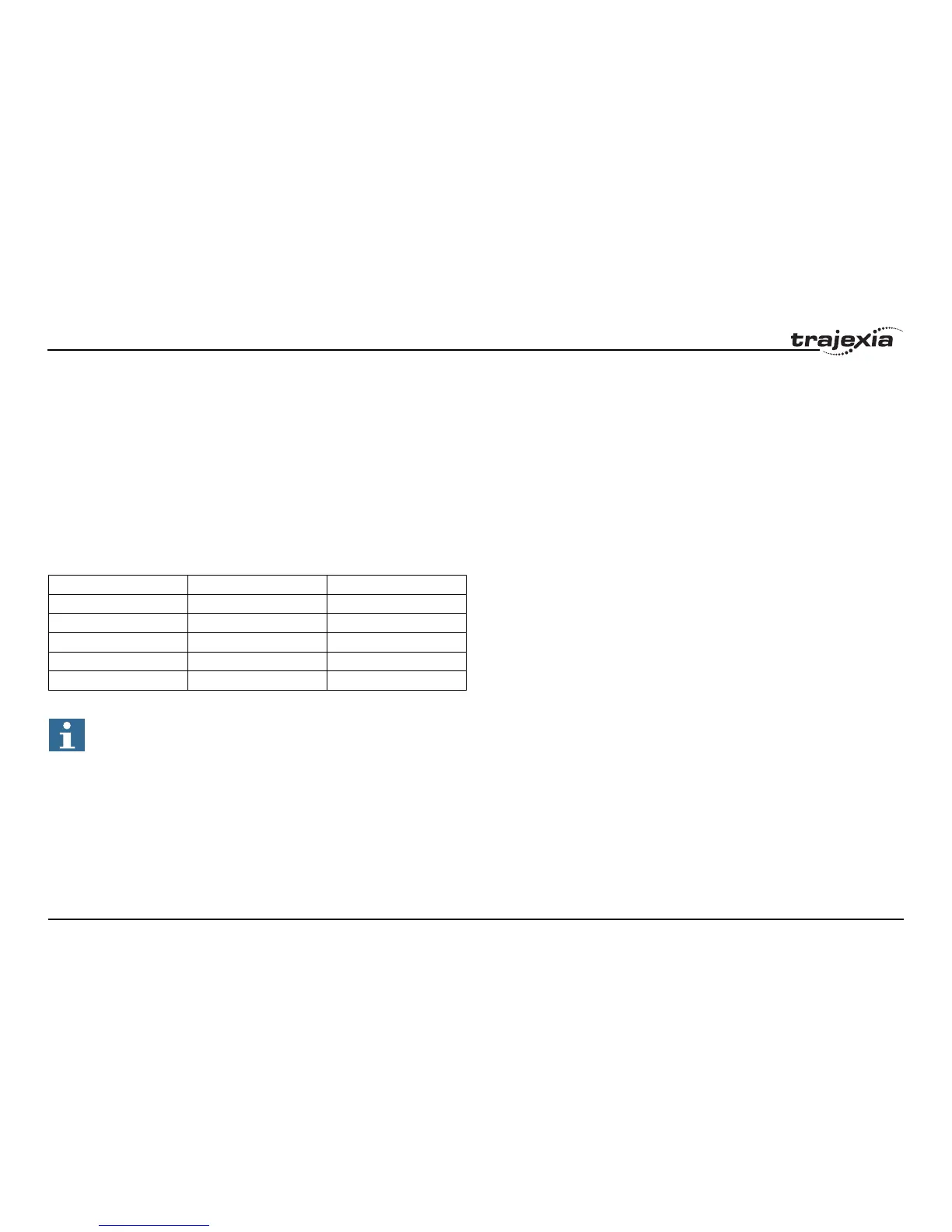
Two very important parameters of the Servo Drivers for conversion of
encoder counts into user units are the electronic gear ratio numerator and
the electronic gear ratio denominator. The table below gives these
parameters for the Servo Drivers.
/i
If a servo motor with an absolute encoder is used, setting parameter Pn205
(Multiturn limit for Sigma-II) is also necessary.
Servo Driver Numerator Denominator
Sigma-II Pn202 Pn203
Sigma-V Pn20E Pn210
Junma Pn20E Pn210
G-Series Pn205 PN206
Accurax G5 Pn009 PN010
Note
The remainder of this section uses the parameters of the Sigma-II
Servo Driver, that is, Pn202 and Pn203. If you use a different
Servo Driver, you must use the corresponding parameters.