Examples and tips
PROGRAMMING MANUAL 263
Revision 1.0
Because n and m are integers: Pn205 = m – 1. This setting is explained in
the following example.
Example 2
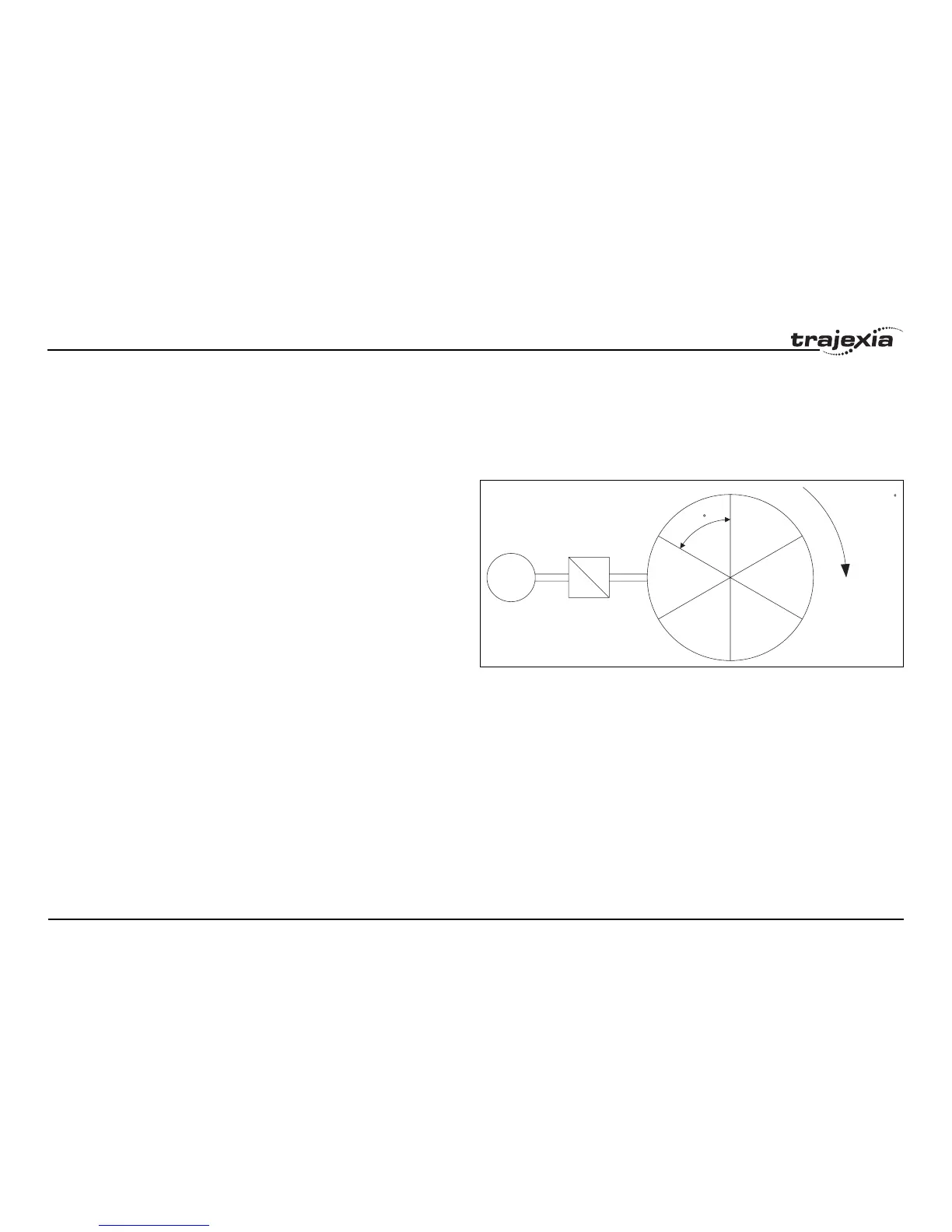
fig. 20
The mechanical system consists of simple rotary table shown in the figure. A
servo motor with 16-bit absolute encoder is used. The gear ratio of the
gearbox is 1:10. The desired user units are degree of angle. The rotary table
is divided in six sections of 60 degrees each. Therefore the machine_cycle
is 60 degrees.
When we apply the last equation to the above, we get:
Simplification of this equation gives:
This results in:
We calculate the parameters as we did in example 1. This gives:
To guarantee the correct overflow both in Trajexia and in the Servo Driver,
we must set two additional axis parameters: REP_DIST = 60, and
REP_OPTION = 1. With these settings, the command MOVE(35) rotates the
table 35 degrees in positive direction. The range of possible MPOS and
DPOS values is from 0 degrees to 60 degrees.
n machine_cycles = m motor_revolution
..
1:10 Gear
16-bit
absolute
encoder
Full turn = 360
M
60
10 motor_revolution = 1 machine_revolution = 6 machine_cycle
.. .
5 motor_revolution = 3 machine_cycle
..
Pn205 = 5-1 = 4
UNITS = 2 = 204