Examples and tips
PROGRAMMING MANUAL 265
Revision 1.0
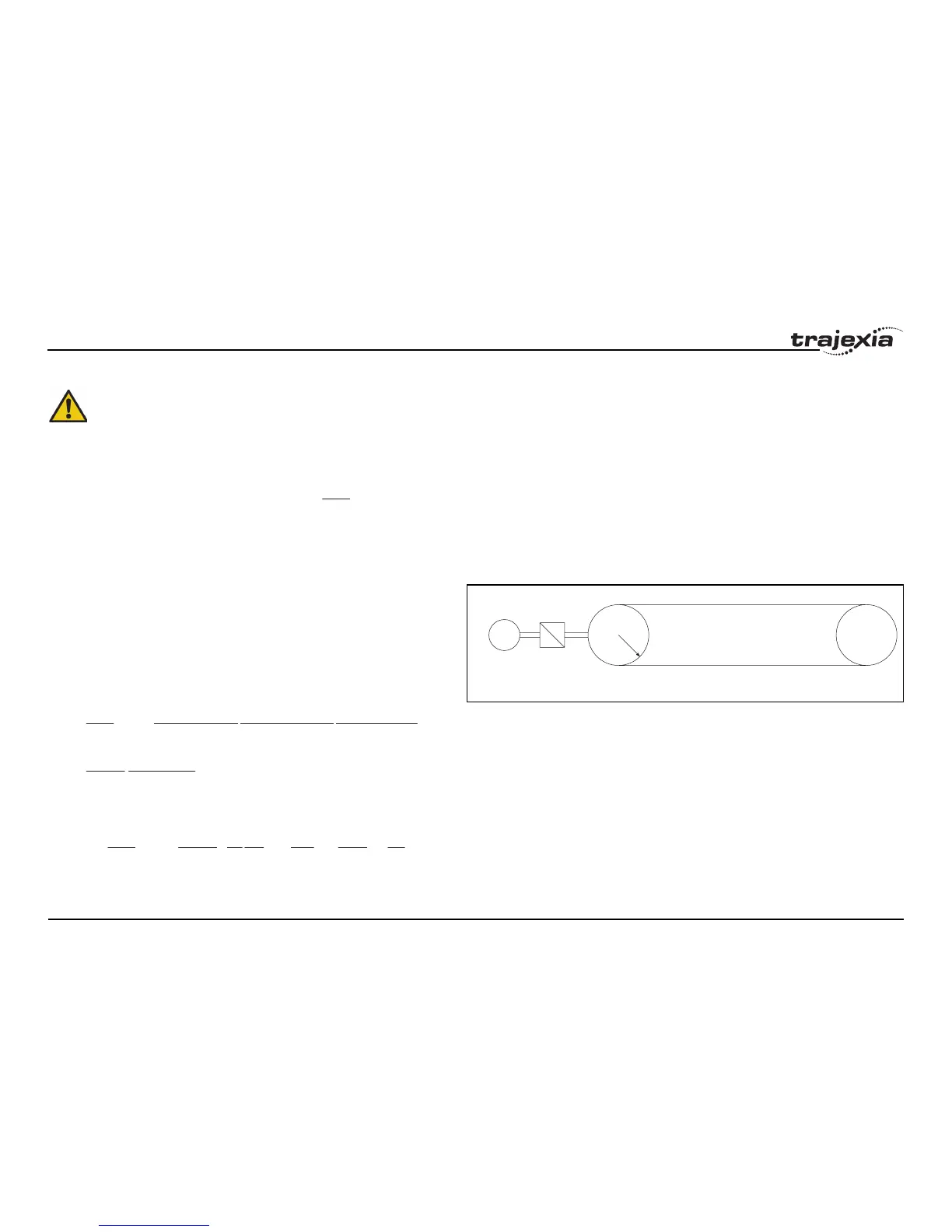
Example 3
fig. 21
The mechanical system uses a servo motor with an 17-bit absolute encoder.
The mechanical gear ratio of the gearbox is 1:6.31. One rotation of the
pulley moves the moving part on the belt 320 mm. The total length of the
belt, and therefore the total moving range of the motion part, is 4160 mm.
The mechanical measurement units must be mm. This means that all axis
parameters and commands given to Trajexia are expressed in mm. Using
the same procedure as in example 1, the equation expressing the
relationship between user units and encoder counts is:
Therefore:
One solution is:
Caution
To make sure that the absolute position is always correct, you
must make sure that
and that
Note that this is not obvious for the high-resolution encoders of the
Sigma-V motors.
(Pn205 + 1)
..
encoder_resolution < 2
32
(Pn205 + 1)
.
Pn202
Pn203
.
encoder_resolution < 2
32
17-bit absolute
encoder
1:6.31
Gear
r = 320/(2*PI)
1 turn = 320mm move
Total length (perimeter) of belt: 4160
M
r
Pn202
Pn203
UNITS =
2
17
encoder_counts
1 motor_revolution
1 pulley_revolution
6.31 motor_revolution
320mm
1 pulley_revolution
320
2 6.31
mm
encoder_counts
=
.
17
.
.
..
.
Pn202
Pn203
UNITS =
2
320
17
6.31 2
1000
17
631
=
2
5
8.125
631
= 2
12
631
= 2
12
125
2
3
631
= 2
9
125
.
.