Examples and tips
PROGRAMMING MANUAL 289
Revision 1.0
The input used for registration is determined by the argument of the REGIST
command.
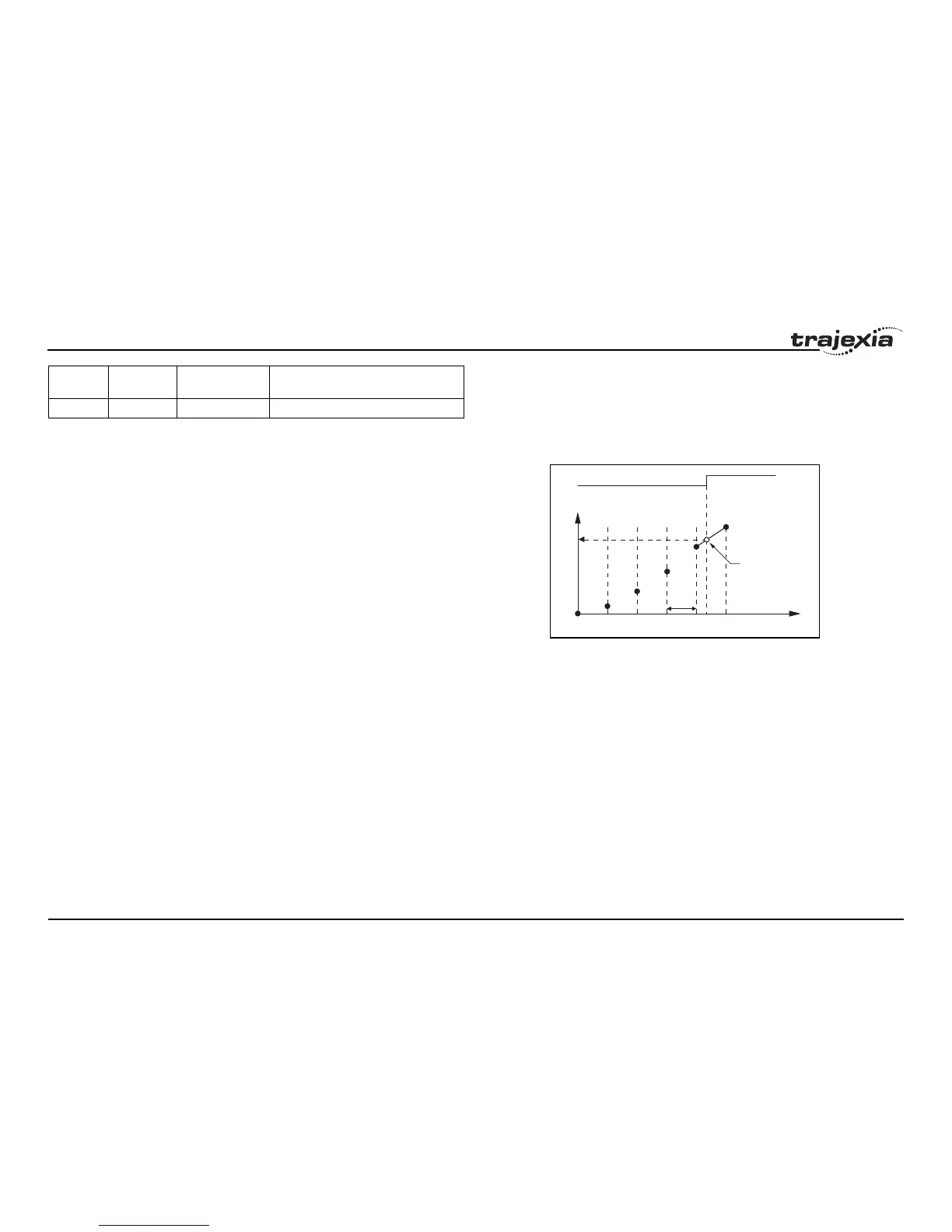
fig. 33
The delay in the capture in the Sigma-II Servo Driver is about 3 µs. As the
encoder information is refreshed every 62.5 µs, it is necessary to make
interpolation to obtain the right captured position value (see the picture).
Since the motor speed cannot change much during 62.5 µs, the resulting
accuracy is very high.
The delays in transmission of the information are:
• Delay in triggering the registration: 0.625 ms to 4 ms.
• Delay in receiving the registration: 3.5 ms.
• Delay in capturing the registration: 3 µs.
It is also possible to use the encoder Z-mark to register an axis position. This
is also done with the argument of the REGIST command.
EXT 3 Pn511.3 As for EXT 1 As for EXT 1
Registra-
tion signal
Parameter
number
Parameter value Description
t
Position
Interpolated
position
62.5µs
Latch input