GRT1-ML2 timing
PROGRAMMING MANUAL 351
Revision 1.0
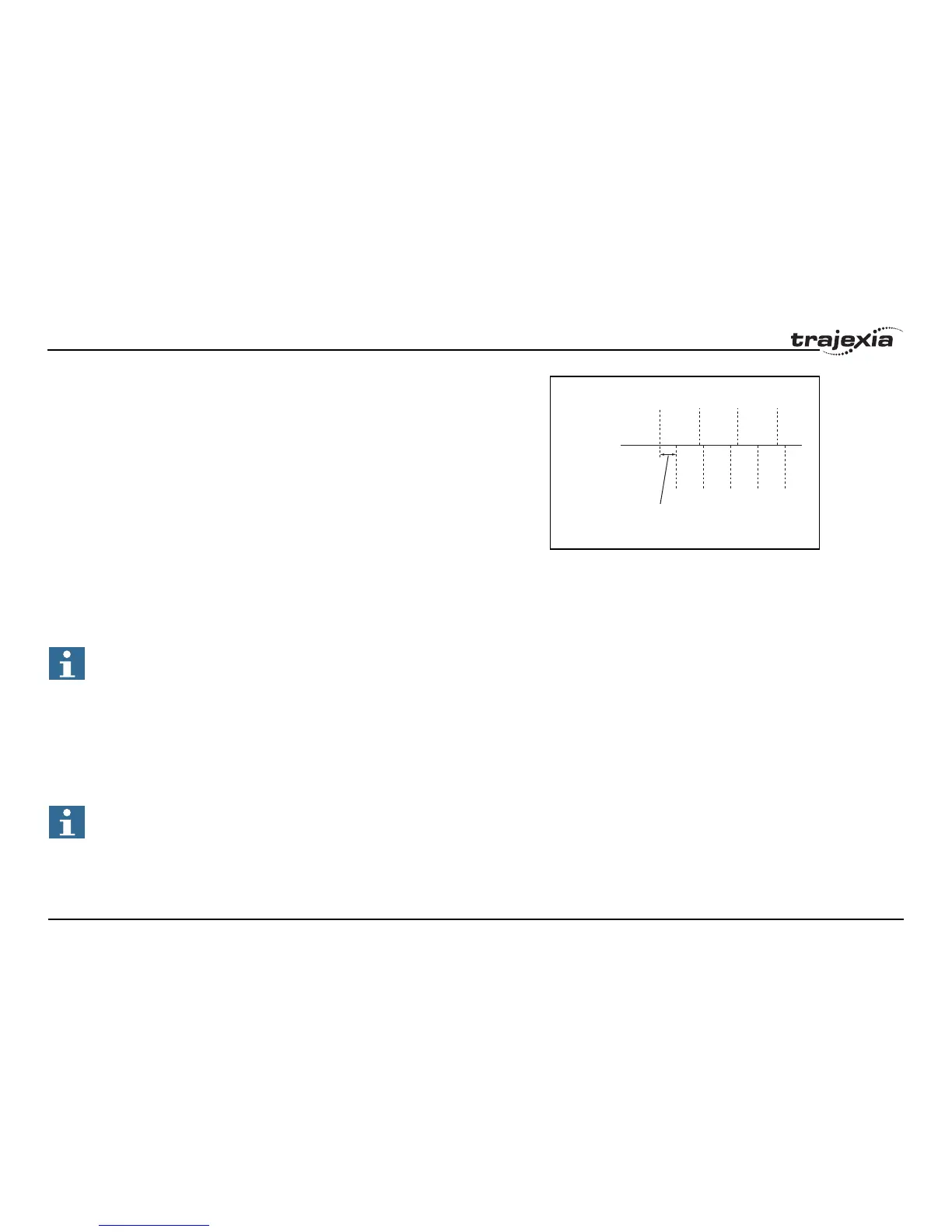
fig. 1
These refresh cycles are independent, they are not synchronized. Therefore
a small delay in the communication between the TJ2-MC64 and the
SmartSlice I/O Units occurs. The maximum duration of this delay is the
longest refresh cycle time. This delay is “quasi-random”, and it is not
possible to compensate it. Applications that require more precisely timed I/O
must use the onboard I/O of the TJ2-MC64.
A.1.2 Paging
The maximum amount of data that can be transferred in one servo period
with the MECHATROLINK-II protocol is 27 bytes. This is called a page. If the
GRT1-ML2 transfers more than 27 bytes of input and/or output data, the
data is divided into multiple pages. These pages are transferred in multiple
servo periods. The transferred I/O data is only used when all pages are
transferred.
The contribution of the individual slices to the I/O data size is described in
section 2-2-2 of the GRT1 Series SmartSlice I/O Units Operation Manual
(W455).
To display the number of pages used, execute the command
MECHATROLINK(unit,38,station,vr). This command reads the paging data
and stores it in the VR array: first the number of input pages, and then the
number of output pages. If vr equals -1, the paging data is printed to the
Command Line Terminal interface.
MECHATROLINK-II bus
GRT1-ML2
SmartSlice bus
Quasi-random delay
T
servo
T
SL
Note
If the number of input pages and the number of output pages are
different, the refresh cycle of the input data and the refresh cycle of
the output data are also different.
Note
A system with at most 6 slices typically produces less than 27
bytes of I/O data, in which case the number of pages is 1.