BASIC commands
PROGRAMMING MANUAL 60
Revision 1.0
fig. 12/i
fig. 13/i
Example FORWARD
WA(10000)
CANCEL ' Stop movement after 10 seconds
Example MOVE(1000)
MOVEABS(3000)
CANCEL ' Cancel the move to 3000 and move to 4000 instead.
MOVEABS(4000)
Note that the command MOVEMODIFY is a better solution for modifying end
points of moves in this case.
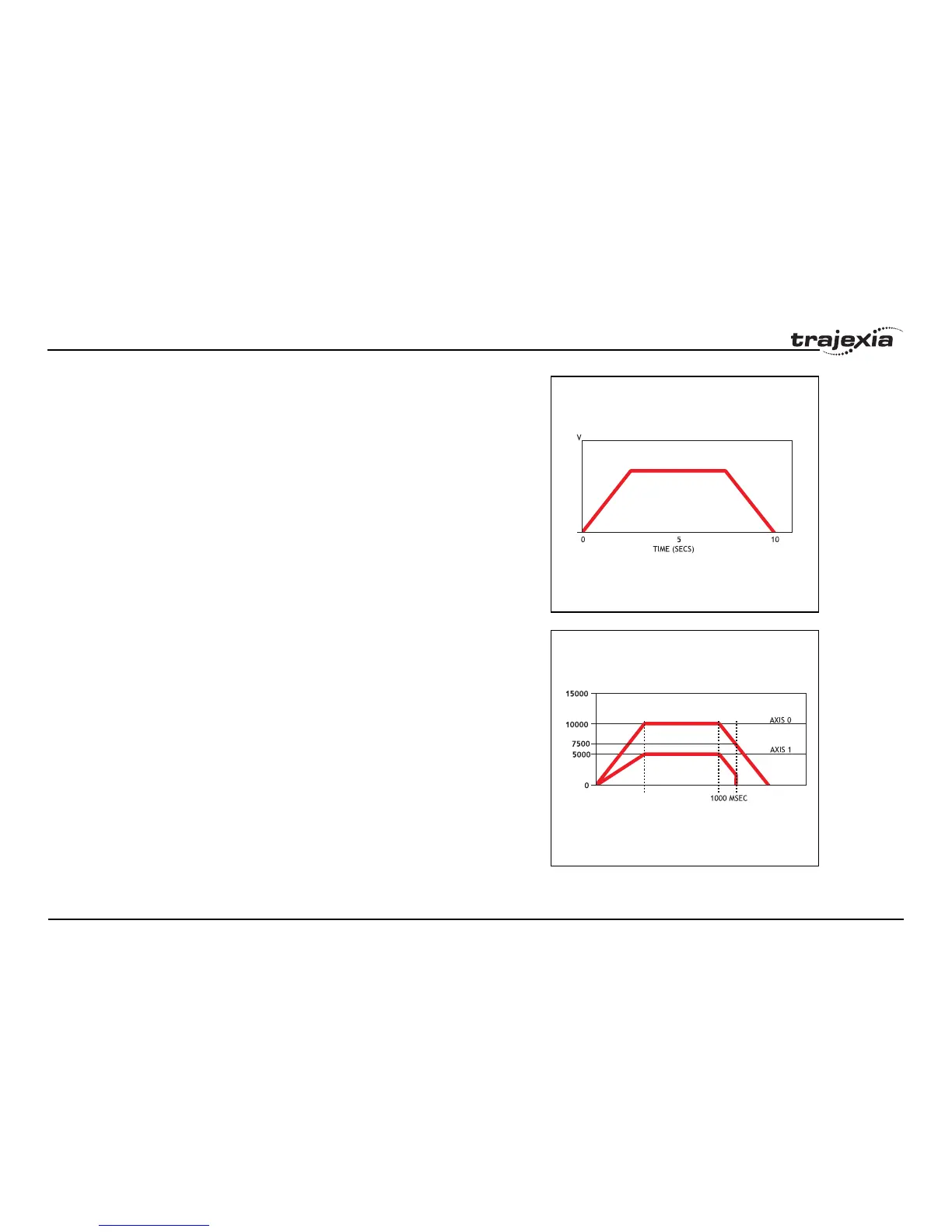
Example Two axes are connected with a ratio of 1:2. Axis 0 is cancelled after 1 second,
then axis 1 is cancelled when the speed drops to a specified level. After the
first cancel axis 1 decelerates at the DECEL rate. When the CONNECT of
axis 1 is cancelled, axis 1 stops instantly.
BASE(0)
SPEED=10000
FORWARD
CONNECT(0.5,0) AXIS(1)
WA(1000)
CANCEL
WAIT UNTIL VP_SPEED<=7500
CANCEL AXIS(1)
See also AXIS, MTYPE, NTYPE, PMOVE, RAPIDSTOP