BASIC commands
PROGRAMMING MANUAL 73
Revision 1.0
3.2.78 DATUM
/i
/i
Type Axis command
Syntax DATUM(sequence)
Description The DATUM command performs one of 6 origin search sequences to position
an axis to an absolute position and also reset the error bits in AXISSTATUS
axis parameter.
DATUM uses both the creep and demand speed for the origin search. The
creep speed in the sequences is set with the CREEP axis parameter and the
demand speed is set with the SPEED axis parameter. The datum switch input
number, used for sequences 3 to 6, is set by the DATUM_IN parameter.
DATUM works on the default basis axis (set with BASE) unless AXIS is used
to specify a temporary base axis.
Note: The origin input set with the DATUM_IN parameter is active low, i.e., the
origin switch is set when the input is OFF. The feedhold, reverse jog, forward
jog, forward and reverse limit inputs are also active low. Active low inputs are
used to enable fail-safe wiring.
Arguments • sequence
See the table below.
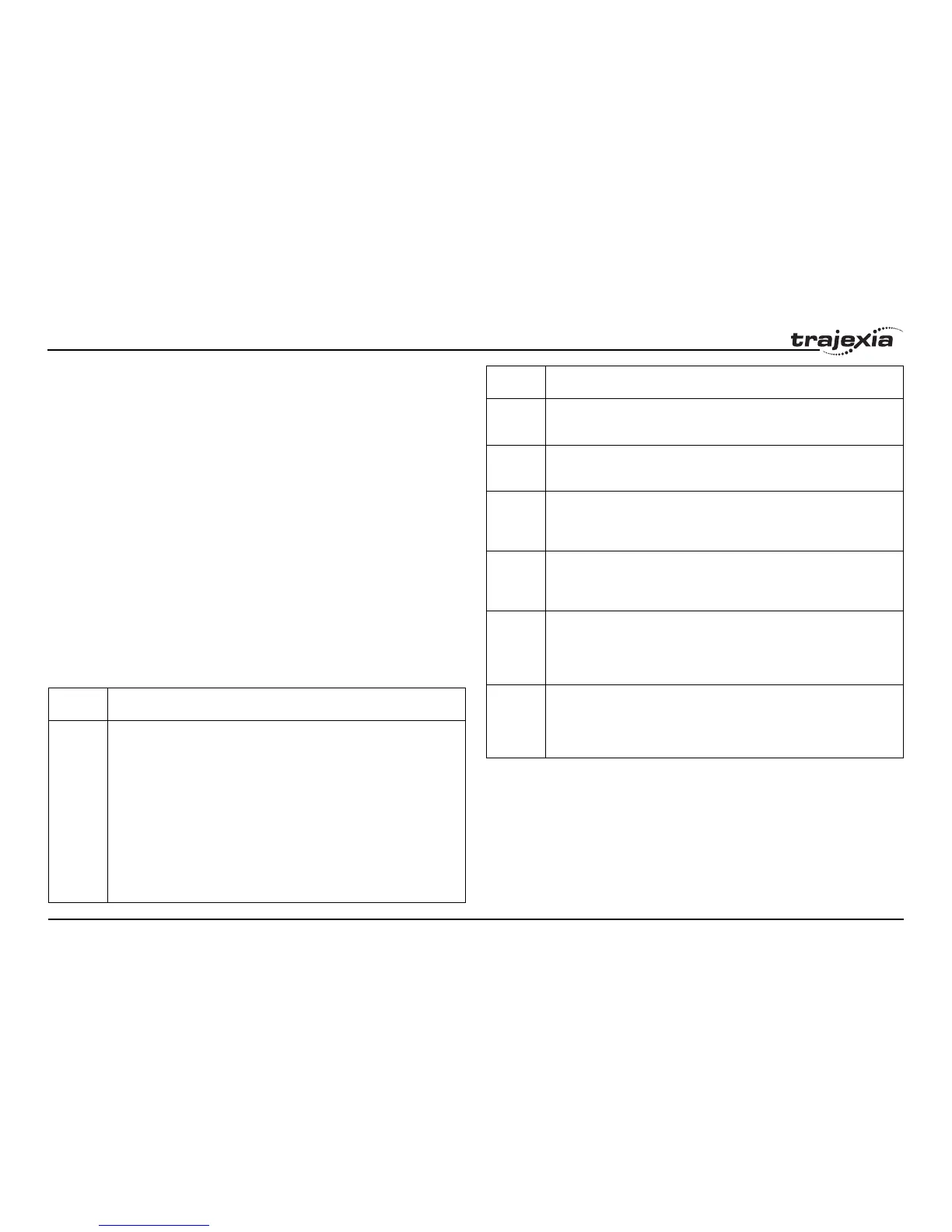
sequence
value
Description
0The DATUM(0) command will clear the motion error. The currently measured
position is set as the demand position (this is especially useful on stepper
axes with position verification). DATUM(0) also clears the Following Error that
exceeded the FE_LIMIT condition in the AXISSTATUS register for ALL axes.
It sets these bits in AXISSTATUS to zero:
Bit 1 : Following Error Warning.
Bit 2 : Remote Drive Comms Error.
Bit 3 : Remote Drive Error.
Bit 8 : Following Error Limit Exceeded.
Bit 11 : Cancelling Move.
Note that the status can not be cleared if the cause of the problem is still
present. DATUM(0) must only be used after the WDOG is set to OFF, other-
wise there will be unpredictable errors on the motion.
1 The axis moves at creep speed forward until the Z marker is encountered.
The demand position is then reset to 0 and the measured position corrected
so as to maintain the Following Error.
2 The axis moves at creep speed in reverse until the Z marker is encountered.
The demand position is then reset to 0 and the measured position corrected
so as to maintain the Following Error.
3 The axis moves at the demand speed forward until the datum switch is
reached. The axis then moves reverse at creep speed until the datum switch
is reset. The demand position is then reset to 0 and the measured position
corrected so as to maintain the Following Error.
4 The axis moves at the demand speed in reverse until the datum switch is
reached. The axis then moves forward at creep speed until the datum switch
is reset. The demand position is then reset to 0 and the measured position
corrected so as to maintain the Following Error.
5 The axis moves at demand speed forward until the datum switch is reached.
The axis then reverses at creep speed until the datum switch is reset. The
axis continues in reverse at creep speed until the Z marker of the encoder is
encountered. The demand position is then reset to 0 and the measured posi-
tion corrected so as to maintain the Following Error.
6 The axis moves at demand speed reverse until the datum switch is reached.
The axis then moves forward at creep speed until the datum switch is reset.
The axis continues forward at creep speed until the Z marker of the encoder is
encountered. The demand position is then reset to 0 and the measured posi-
tion corrected so as to maintain the Following Error.
sequence
value
Description