166
FREF2 (n025)
FREF3 (n026)
FREF4 (n027)
FREF5 (n028)
FREF6 (n029)
FREF7 (n030)
FREF8 (n031)
FREF9 (n120)
FREF10 (n121)
FREF11 (n122)
FREF12 (n123)
FREF13 (n124)
FREF14 (n125)
FREF15 (n126)
FREF16 (n127)
FJOG (n032)
n164
n004
FREF1 (n024)
n132
n129
n130
1
n131
n132
1
n135
㬍1
㬍-1
n133
n163
n008
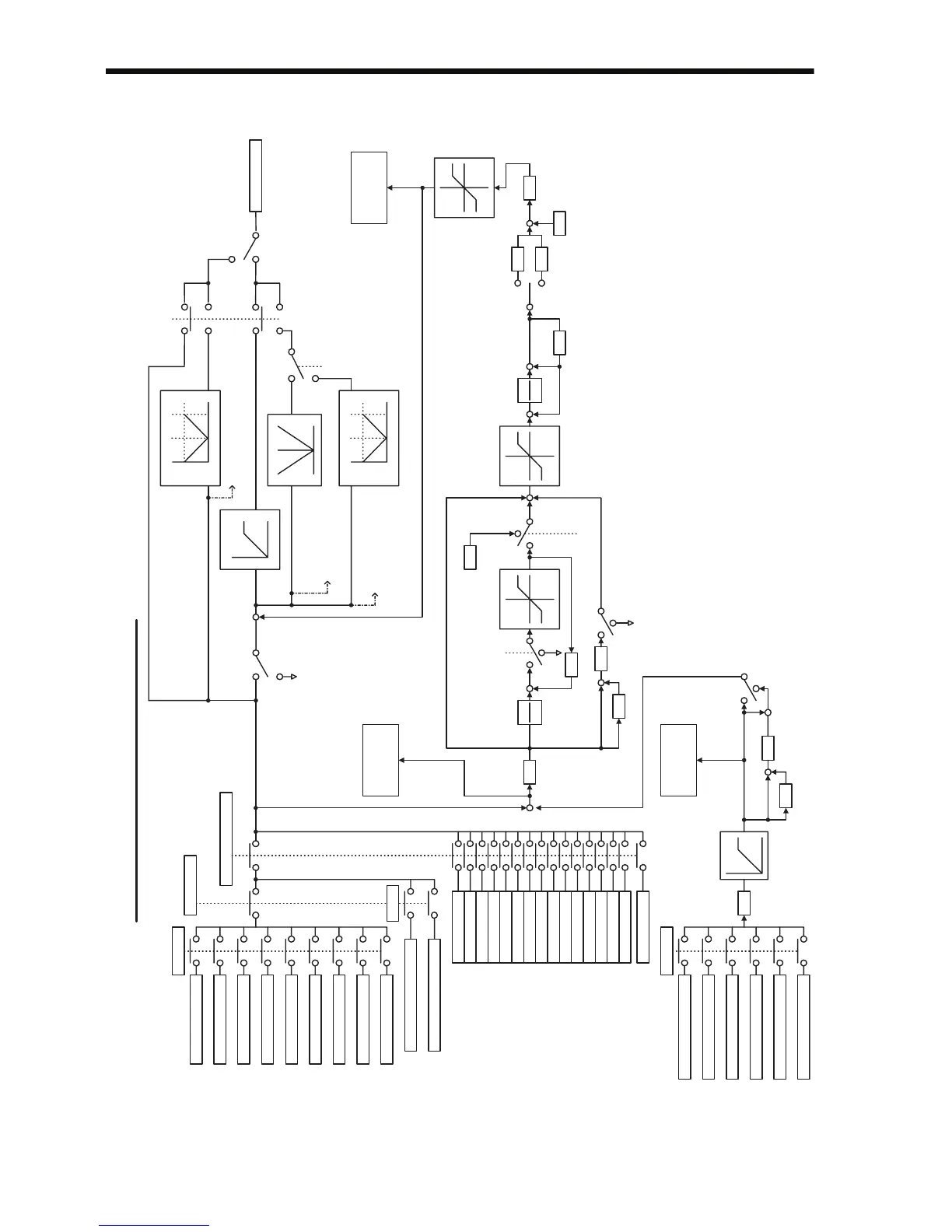
Frequency
reference selection
Operator potentiometer
External terminal (0 to 10 V)
External terminal (4 to 20 mA)
External terminal (0 to 20 mA)
Communications
Pulse train
Operator (0 to 10 V)
Operator (4 to 20 mA)
FREF1 (n024)
Operator potentiometer
Remote/Local
Multi-step speed reference
Pulse train
External terminal (0 to 10V)
External terminal (4 to 20mA)
External terminal (0 to 20mA)
Operator (0 to 10 V)
Operator (4 to 20 mA)
Adjustment
gain
PID feedback
value selection
100%
Z
−1
+
−
Derivative time (D)
n128=2, 4, 6, 8
+
+
PID control
selection
n128=1, 3, 5, 7
Feedback value
MNTR (U-16)
100%/FMAX
+
−
Proportional
gain
Z
−1
+
−
Derivative time (D)
n128=1, 3, 5, 7
PID control selection
n128=2, 4, 6, 8
Integral hold from
multi-function input
Z
−1
Integral time (I)
compensation
with reminder
+
+
Integral reset from
multi-function input
−n134
n134
Integral upper limit
Z
−1
+
+
+
Note: Z
-1
cannot be cleared during run command input. Z
-1
can be cleared during stop command input, or during PID
cancel by the multi-function input.
−100%
100%
+
−
Z
−1
+
+
PID primary delay time
constant compensation
with reminder
n128 = 5, 6, 7, 8
PID offset adjustment
+
+
PID output gain
PID control
selection
n128=1, 2, 3, 4
−200%
200%
PID output value
MNTR (U-18)
100%/FMAX
PID INPUT
MNTR (U-17)
100%/FMAX
n128=1, 2, 5, 6
PID control
selection
+
+
n128 = 3, 4, 7, 8
0%
110%
100%
0 50% 100%
ON
OFF
0
1
0
1
100%
0 50% 100%
n145
n128=0 or PID cancel by
the multi-function input
n128≠0
Output frequency
(Bi-directional range)
0% to 50%: Reverse of
the input rotation
direction
50% to 100%: Input
rotation direction
(Bi-directional range)
0% to 50%: Reverse of the input
rotation direction
50% to 100%: Input rotation direction
Bi-directional PID prohibit
through multi-function input
Bi-directional Selection
(Bi-directional PID)
If negative data,
reverse of the input
rotation direction.
V7AZ PID Control Block Diagram