Overview
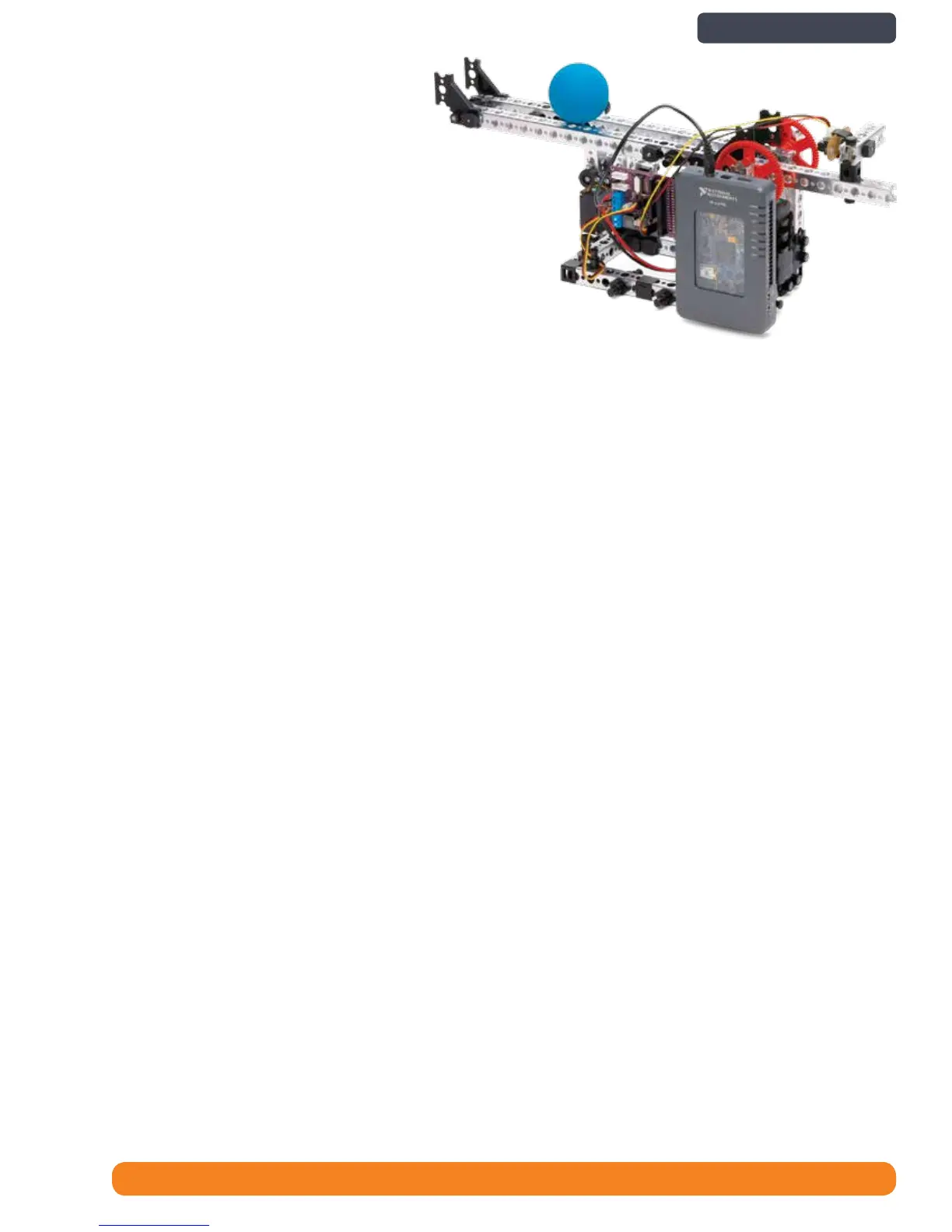
The TETRIX Prime Balancing Arm is an assembly
that demonstrates how control concepts taught
in engineering classes can be applied. The arm
itself is rotated by a servo motor, and balances
a ball in a position specified by the user (i.e.
setpoint). The servo is controlled by a closed-
loop PID (proportional-integralderivative)
algorithm implemented in LabVIEW. The
feedback data is ball position, which is collected
from an infrared (IR) sensor. If the ball is out of
position, the difference between the set point
and position data from the IR sensor (i.e. error)
will be calculated, and the PID loop will correct it over time.
Base Functionality
• The balance arm is rotated by a servo motor, which receives PWM position data
• The position of the ball is measured by an infrared (IR) sensor, which inputs data via an analog line
• The user specifies a position setpoint on the front panel of the LabVIEW VI
• The system gradually moves the ball to the position using PID control
• After building the assembly the user must calibrate the arm by indicating the servo position at which the arm is
parallel to the ground
• Before every use, the user must also calibrate the controller to recognize the minimum and maximum edges of the
arm
• The PID gains are auto-tuned, requiring no input by the user
Expansion and Teaching Options
• Learn how the Balance Arm relates to controls concepts like closed-loop stability, disturbance rejection and
performance, and PID controller design (See the Connections to Controls Concepts at the end of this section)
• Program the balance arm to alternate between two different position setpoints
Balancing Arm
Note: It’s recommended that you only balance a standard racquetball on the Balancing Arm due to its size, weight,
consistency, and other properties. The control system has also been optimized for use with a racquetball.
Balancing Arm Assembly 83
Balancing Arm Assembly 83
Back to Contents page