QB SOFTHAND RESEARCH USER GUIDE —7
3.2 Center of Mass
The following table gives also the position of the Center of Mass of the SoftHand and defines its
Coordinate System, like depicted in the following schemes.
UNIT LEFT RIGHT
CoM x coordinate,
O
TX
[mm] 5 5
CoM y coordinate,
O
TY
[mm] 3 -3
CoM z coordinate,
O
TZ
[mm] 80 80
Weight [kg] 0.770
Center of Mass, O
T
, is evaluated w.r.t. Σ
M
considering the hand mounted with its palm facing the ground,
cf. the figures below.
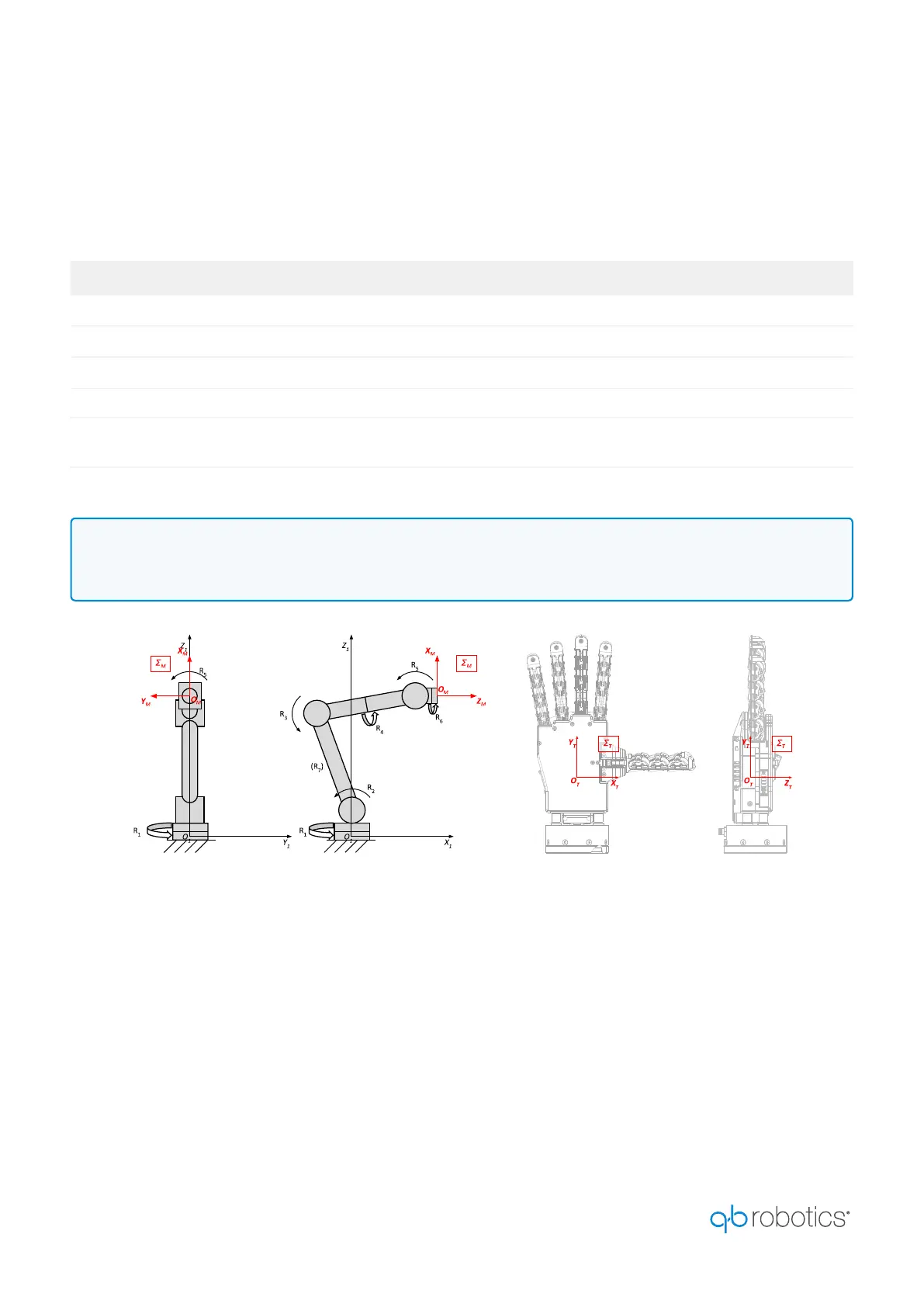
Figure 2. — Robot Tool Coordinate System
On the left, it is represented the mechanical interface coordinate system
Σ
M
(O
M
; X
M
, Y
M
, Z
M
)
of an
articulated robot, as defined by ISO 9787:2013. In particular, the center of the coordinate system,
O
M
, is
on the interface surface of the robot tool flange and the
Z
M
axis is coincident with the tool flange axis of
symmetry.R
i
is the i-th revolute joint of the robot and
(O
1
; X
1
, Y
1
, Z
1
)
is the base coordinate system of the
robot.
On the right,there is the Tool Coordinate System,
Σ
T
(O
T
; X
T
, Y
T
, Z
T
)
, of the SoftHand. The center,
O
T
,
coincides with the center of mass of the hand and its position is defined by the distance from
O
M
. The
Z
T
axis is normal to the palm, outgoing positive, and the
Y
T
axis follows the proximal-distal direction and
orientation. This definition implies that
Σ
T
is the same for left and right SoftHands. So, the positive
orientation of
X
T
axis will be on the side of the thumb in the right hand and on the side opposite to the
thumb in the left hand.
NOTE:
All coordinate systems here described follow the orthogonal right-hand rule.