# INSTRUCTIONS
3
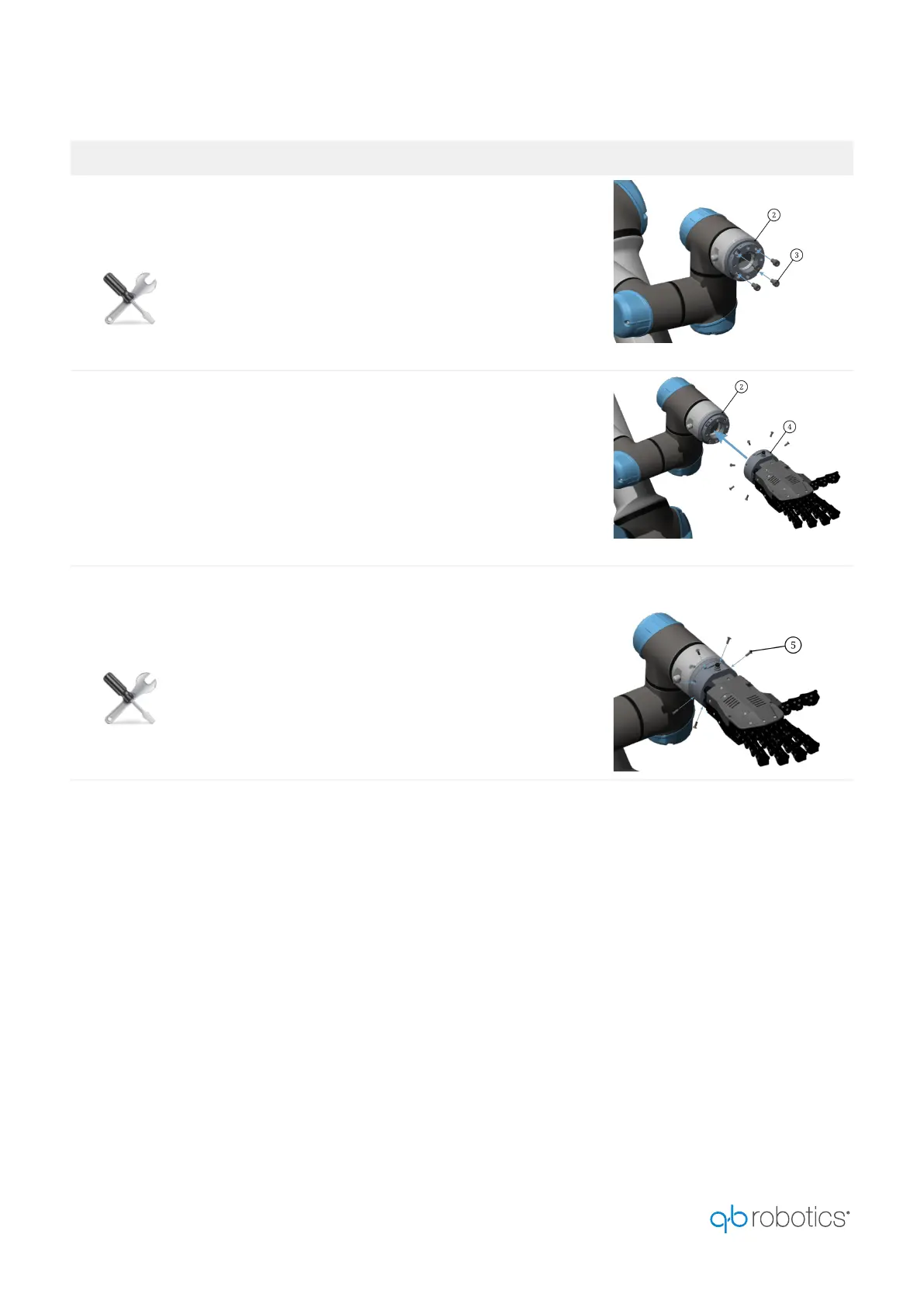
Fasten (2) to the UR wrist by tightening the four screws (3).
You need the 5 mm Allen wrench.
4
Center (4) on the diameter 63 mm of (2), taking care that the plug
fits into one of the four d6 mm through holes.
5
Fix axially the hand by tightening the 8 screws (5).
You need the 2 mm Allen wrench.
Table 1. — Installation guidelines of the SoftHand research on UR. Referring to the baloons in the
pictures: (1) cylindrical pin EN ISO 8734 A d6x14 h6; (2) MC_WR_ALU_ISO_04_33_102; (3) n.4 metrical
screws EN ISO 4762 M6x10; (4)EE_H_RES_R_24V_83_123; (5) n. 8 metrical screws EN ISO 10642 M3x8.
about all the other wirings of CB-Series.