RELEASE 1.0.1 —15 JULY, 2020
•
•
Settings Panel
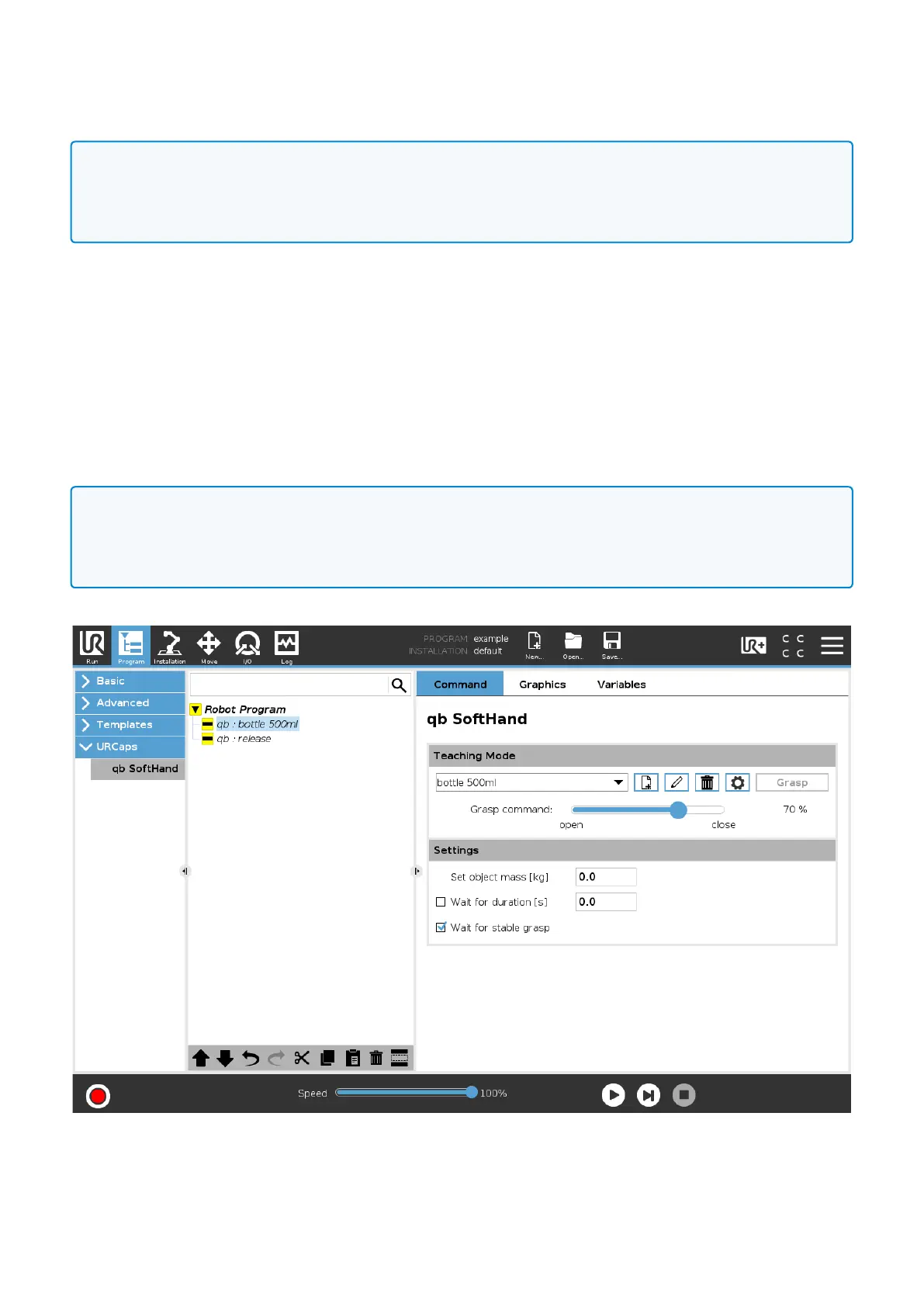
If you are grasping an object with a known mass, you can add it in the proper field to automatically sum it
up with the qb SoftHand one. Remember to set it to 0 when you release the object.
Additionally, you can specify if this Node has to add a wait during the grasp or not. You can choose one of
the two predefined options:
Wait for a given amount of time expressed in seconds;
Wait until the grasp is stable.
If none are satisfying for the given application, feel free to add a Wait Node after the qb SoftHand one.
Figure 9. — qb SoftHand URCap Program Node
NOTE:
As for the Installation Node, the small "gear" does nothing at the current state and will be
enabled in the following releases.
NOTE:
If both the options are selected, they are evaluated in sequence: first it waits for the specified
custom time and then checks whether the grasp is already stable or not.