Reach Alpha Integration Manual | V006
+61 (2) 9519 7651 | info@reachrobotics.com www.reachrobotics.com
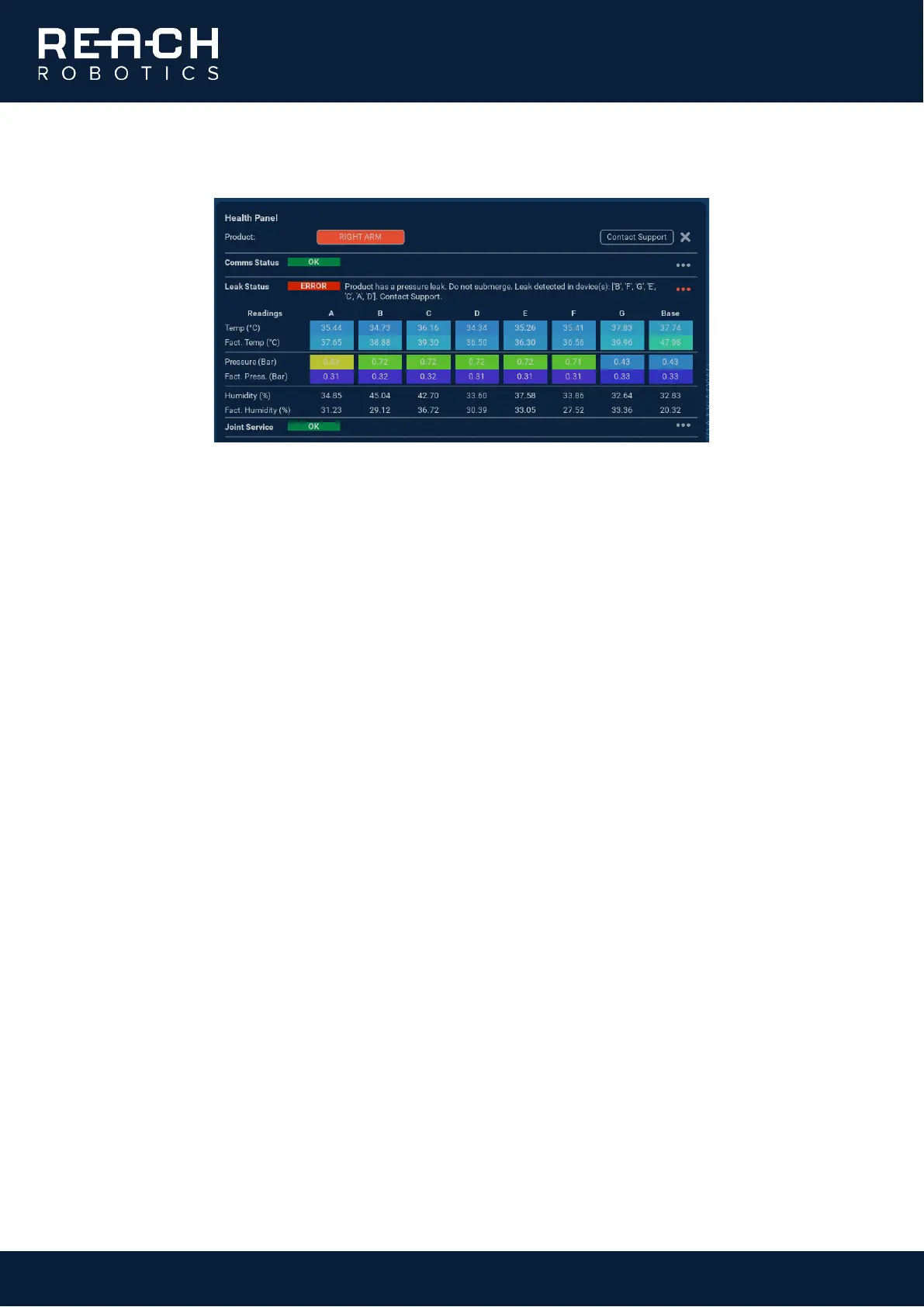
Click the ellipsis […] to view more details if required.
2.2.2. Obstacle setup
Obstacles can be defined within the manipulator workspace to avoid collision between the Bravo and other
equipment. The manipulator arrives with a “floor” obstacle installed to avoid collision with the bench/test platform.
Care should be taken to ensure that any obstacles configured are defined correctly to cover all potential collision
points.
2.2.3. Physical installation
Prior to operation, ensure that the manipulator is firmly secured using the supplied mounting kit, or an alternative
solution with the appropriate specifications.
When the manipulator is under load, ensure that the mounting surface is sufficiently stable to avoid unbalancing.
2.2.4. Operating environment
The Reach Alpha system is designed and tested as partially completed machinery to be integrated into a complete
underwater robotic system. It is possible to use this system in ambient laboratory conditions, however, it should be
noted that radiated emissions from this product may not comply with limits imposed by local authorities. See
Section 3 for more information regarding compliance.
Operating and storage temperature
The manipulator system is specified for operation in water between 5°C- 35°C and storage between -10°C-80°C.
Water Pressure
The Reach Alpha is depth-rated to operate at the equivalent of 300 MSW (Metres below Sea Level).
Explosive environments
Reach Alpha manipulators are not designed to meet explosion-proof specifications. Do not use the robot and
controller in environments containing inflammable gas, gasoline, or solvent. Explosions or fire may otherwise result.