Reach Alpha Integration Manual | V006
+61 (2) 9519 7651 | info@reachrobotics.com www.reachrobotics.com
Harmful substances
Reach Alpha manipulators are not designed to operate in areas in which harmful substances as defined in EN
60721 may be encountered, such as oils, acids, gases, vapours or dusts.
2.2.5. Backdriving
“Backdriving” is the action of moving a manipulator’s joints when the unit is unpowered, which can be dangerous
to the manipulator.
If the joint does not have a slipring installed (e.g. Axis E), the wires between joints can twist, over time disconnecting
from internal connectors and leading to a loss of comms to joints. This will result in an RMA (see section 8.5).
If the joint has an internal hardstop (e.g. Axis B), this can be broken by rotating with excessive force (either by hand
or by a controller), which can lead to twisted cables and damage from debris within the joint.
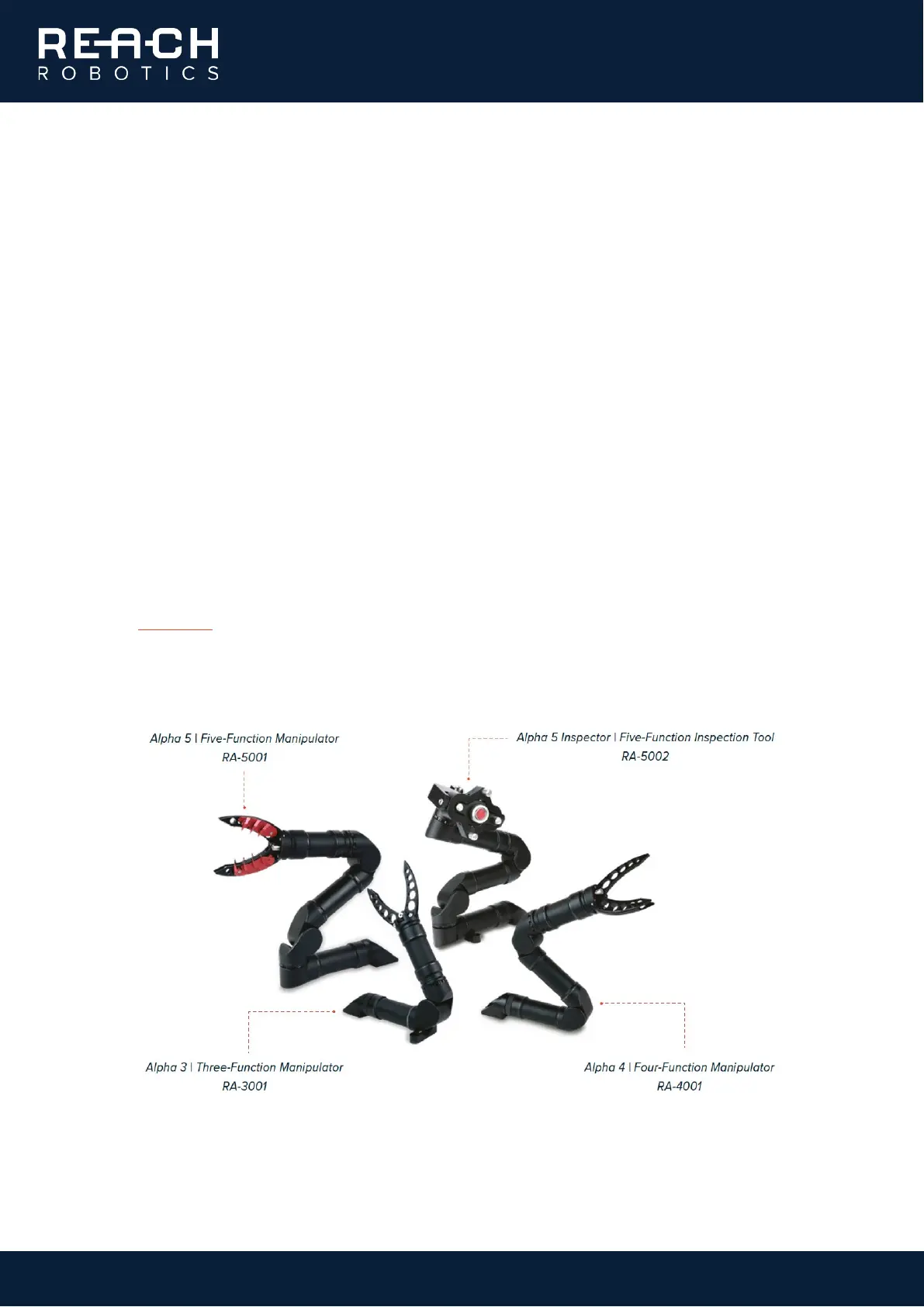
3. Product overview
The Reach Alpha is the world’s smallest, lightest subsea manipulator system intended for precise remote
intervention by militaries, service providers, researchers, and other operators. Please discuss your requirements
with our Sales team prior to purchase to ensure that the Reach Alpha is the correct manipulator for you.
The Alpha is a modular robot, available in configurations ranging from a sun-function rotate actuator up to a 5-
function manipulator. Multiple tooling options are available for the end-effector interface.