RS-Helios-16P User Manual
6.2 Main Data Stream Output Protocol(MSOP)
Main data Stream Output Protocol is abbreviated as MSOP
I/O type: device output, computer analysis
Default port number: 6699
6.2.1 Header
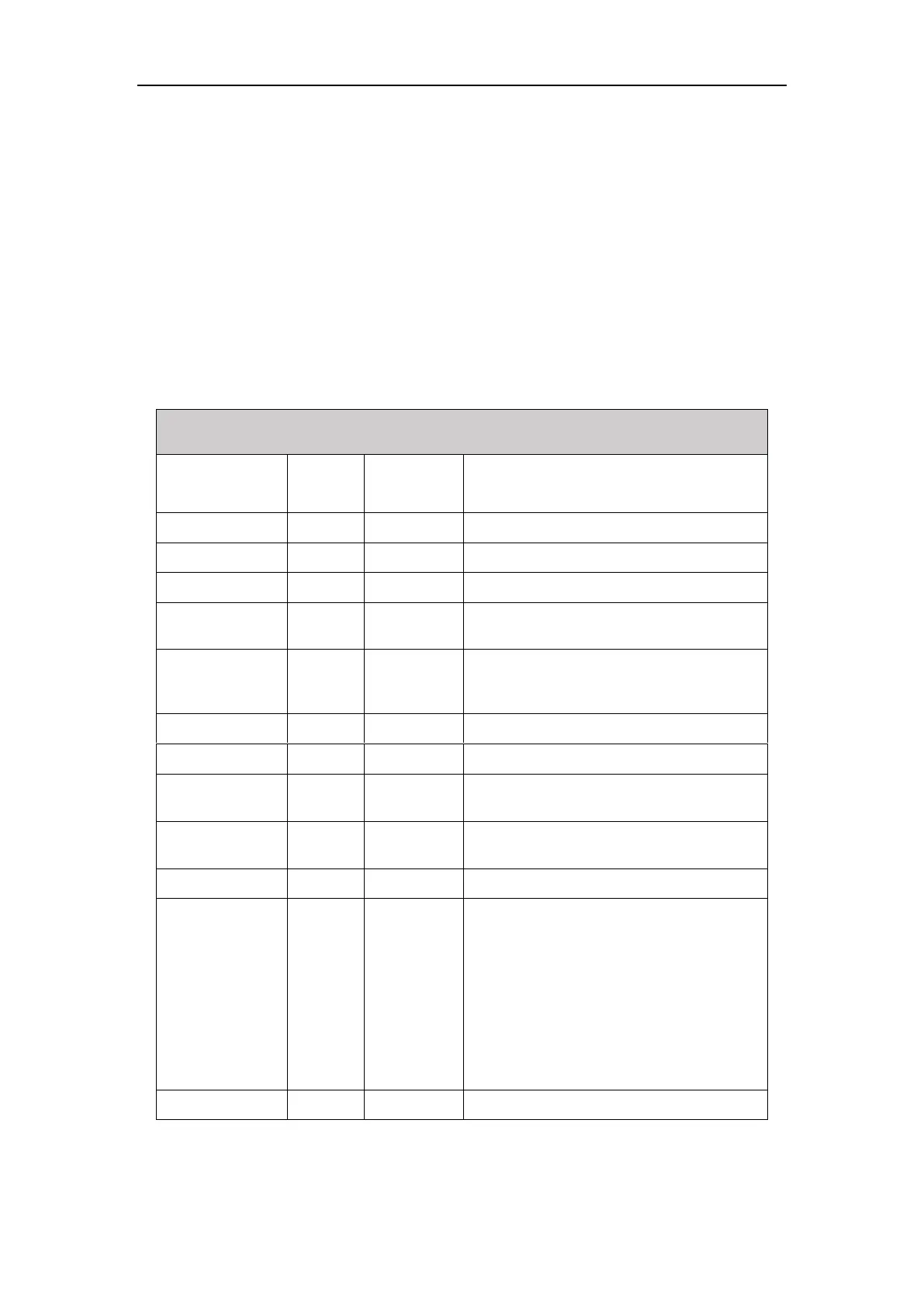
The header has 42 bytes and is used to identify the beginning of the UDP data packet. The structure
of the Header is as shown in the table below:
Table 9 MSOP Header
Top Board Sending
Packet Count
4 Bytes in total, form a sequence with a increment
of 3
Bottom Board
Sending Packet
Count
Angle pulse interval
count
First 6 Bytes are second bits, last 4 bytes are
microsecond bits
Identify LiDAR model
0x01:RS--LiDAR-16
0x02:RS-LiDAR-32
0x03:RS-Bpearl
0x04:RS-Ruby
0x05:RS-Ruby Lite
0x06:RS-Helios-5515
0x07: RS-Helios-1615, RS-Helios-16P
Reserved for future updates
Note: The time stamp is used to record the time of the sensor system, with a resolution of 1us. Please refer to the
definition of time in Appendix B.13.
 Loading...
Loading...
