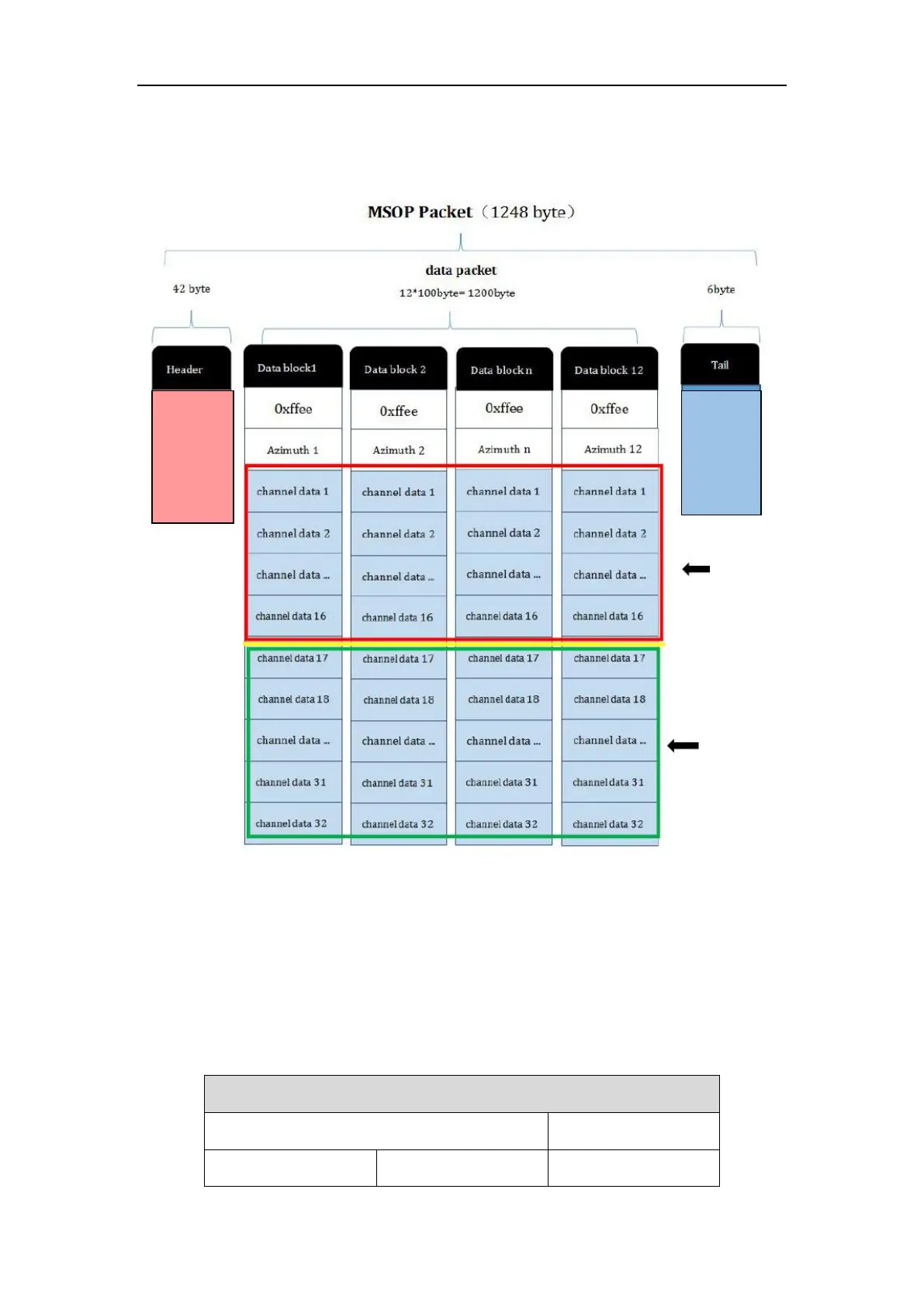
The MSOP packet structure of dual return data is as shown in the figure below:
Figure 13 MSOP Packet Definition of Dual Return Data
6.2.2.1 Channel Data
Each channel data has 3 bytes, the upper two bytes store distance information, and the lower one
byte stores reflectivity information, as shown in the figure below.
Table 10 Channel Data
 Loading...
Loading...
