Rockwell Automation Publication 2198-UM005C-EN-P - February 2022 167
Chapter 9 Kinetix 5300 Safe Torque Off Function
Cascade the Safe Torque-off Signal
The total number of drives in a single cascaded safety circuit is limited by the
current carrying capacity of the cascaded safety wiring and dual-channel
equivalent safety-device contact rating. Refer to Table 86 on page 168 for
current rating per channel, per drive.
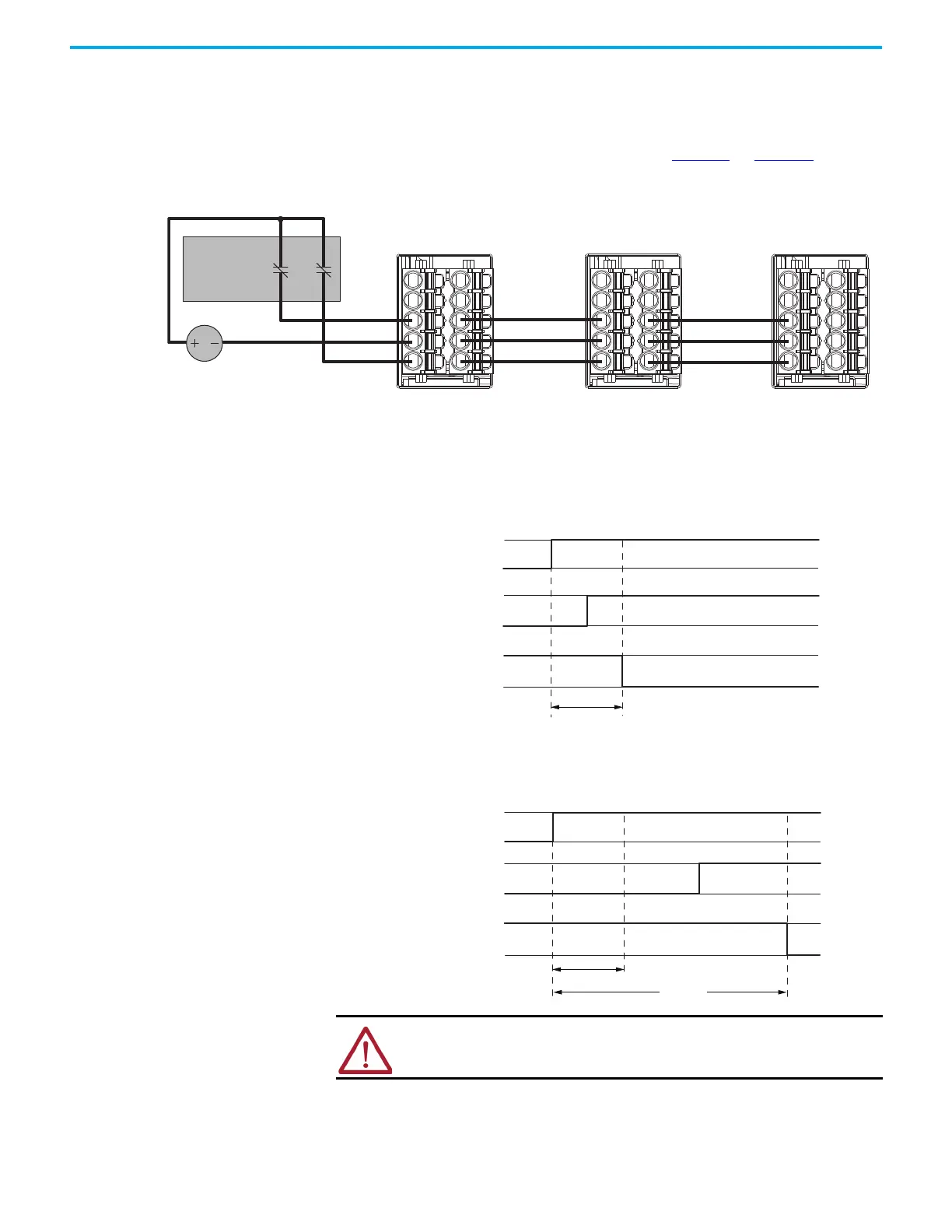
Figure 76 - Cascaded Safe Torque Off Wiring
STO Recovery Time
If the STO inputs discrepancy time is <100 ms, the drive permits torque in
100 ms from the first detected input transition to the ON state.
Figure 77 - STO Recovery Time With Short STO Inputs Discrepancy
If the STO inputs discrepancy time is >100 ms, but < 1.0 s, the drive permits
torque after 1.0 s from the first detected input transition to the ON state.
Figure 78 - STO Recovery Time With Long STO Inputs Discrepancy
Pin 1
SB+
SB-
S1
SC
S2
Pin 1
24V DC
First Drive
Middle Drive
Last Drive
Dual-channel
Equivalent
Safety Device
100 ms
24V DC
24V DC
0V DC
1
0
0V DC
GuardStopRequestStatus
SS_IN_CH0
SS_IN_CH1
100 ms
24V DC
24V DC
0V DC
1
0
1 second
0V DC
GuardStopRequestStatus
SS_IN_CH0
SS_IN_CH1
ATTENTION: If both inputs are not in the ON state after one second,
GuardStopInputFault is posted.
 Loading...
Loading...



