60 Rockwell Automation Publication 2198-UM005C-EN-P - February 2022
Chapter 4 Connector Data and Feature Descriptions
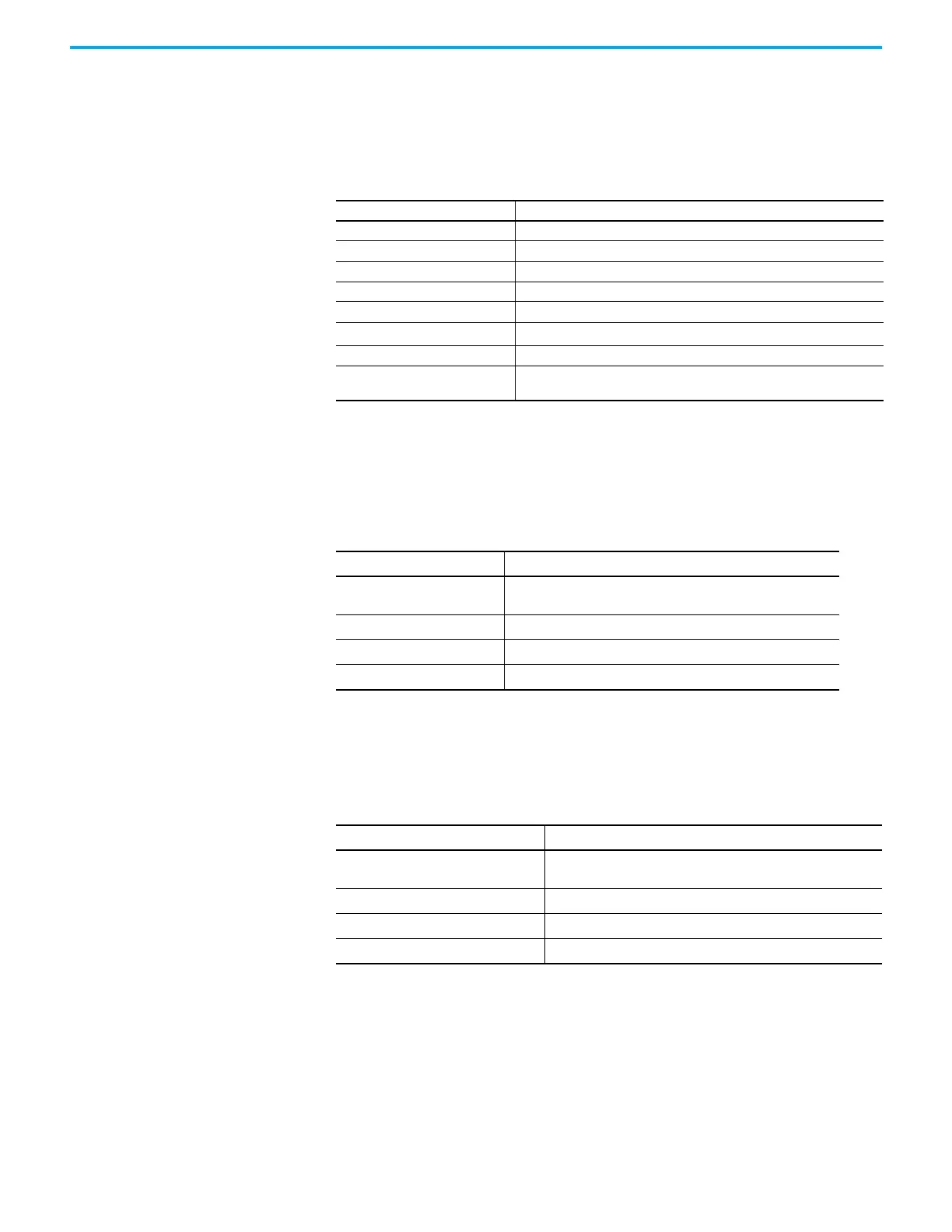
Hiperface Feedback
Hiperface absolute high-resolution feedback from Kinetix MP motors and
actuators and Kinetix LDAT linear thrusters applies to the 15-pin motor
feedback connector.
Table 26 - Hiperface Specifications
Nikon Encoder Feedback Specifications
Nikon (24-bit) absolute high-resolution feedback from Kinetix TLP servo
motors applies to the 15-pin motor feedback connector.
Table 27 - Nikon Encoder Specifications
Tamagawa Encoder Feedback Specifications
Tamagawa (17-bit) encoder feedback from Kinetix TL-Axxxx-B and
TLY-Axxxx-B servo motors applies to the 15-pin motor feedback connector.
Table 28 - Tamagawa Serial Specifications
Attribute Value
Memory support Not programmed, or programmed with Allen-Bradley motor data
Hiperface data communication 9600 baud, 8 data bits, no parity
Sine/cosine interpolation 4096 counts/sine period
Input frequency (AM/BM) 250 kHz, max
Input voltage (AM/BM) 0.6...1.2V, peak to peak, measured at the drive inputs
Line loss detection (AM/BM)
Average (sin
2
+ cos
2
) > constant
Noise filtering (AM and BM) Two-stage coarse count pulse reject filter with rejected pulse tally
Incremental position verification
Position compare between incremental accumulator and serial data performed
every 50 ms or less
Attribute Value
Encoder nonvolatile memory
usage
Programmed with Kinetix TLP motor data as Allen-Bradley memory
format
Differential input voltage 1.0…7.0V
Data communication 8 Mbps, 21 data bits, no parity
Battery type 3.6V, ER14252 or equivalent, 1/2 AA size
Attribute Value
Encoder nonvolatile memory usage
Programmed with TL-Axxxx-B and TLY-Axxxx-B motor data as
Allen-Bradley memory format.
Differential input voltage 1.0…7.0V
Data communication 2.5 Mbps, 8 data bits, no parity
Battery 3.6V, ER14252 or equivalent, 1/2 AA size
 Loading...
Loading...



