Rockwell Automation Publication 2080-UM002N-EN-E - November 2022 139
Chapter 8 EtherNet/IP Network
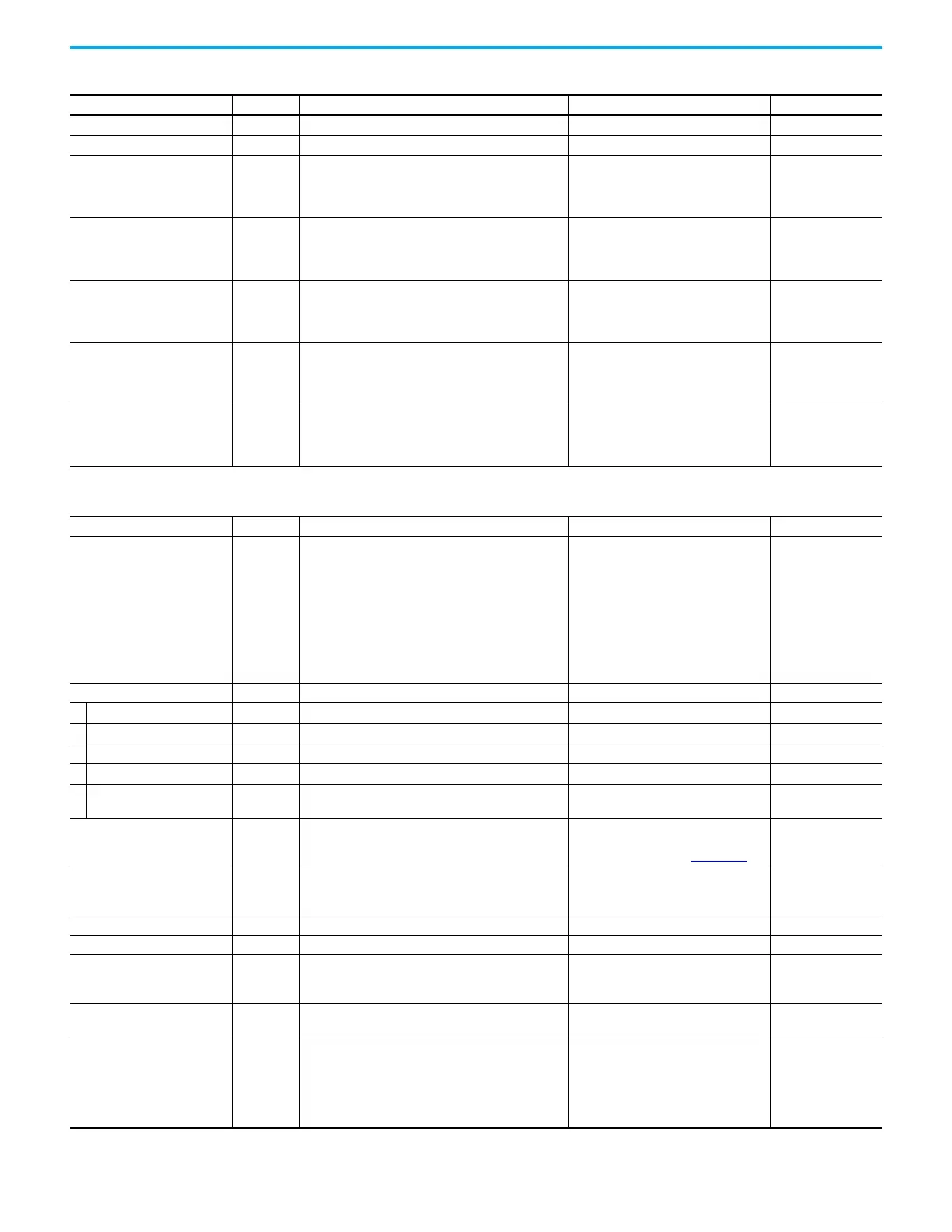
ActualPosition DINT Actual position of the motor. PUU (counts or user units)
AcutalTorque DINT Actual torque of the motor. % motor rated torque
ParamterMonitor1Value DINT Parameter monitor selection 1.
0 = No parameter is selected
0x0001…0xFFFF = returned value that is
mapped from KNX5100C Function List >
Parameter Editor > StatusMonitor ID060
ParamterMonitor2Value DINT Parameter monitor selection 2.
1 = No parameter is selected
0x0001…0xFFFF = returned value that is
mapped from KNX5100C Function List >
Parameter Editor > StatusMonitor ID061
ParamterMonitor3Value DINT Parameter monitor selection 3.
2 = No parameter is selected
0x0001…0xFFFF = returned value that is
mapped from KNX5100C Function List >
Parameter Editor > StatusMonitor ID062
ParamterMonitor4Value DINT Parameter monitor selection 4.
3 = No parameter is selected
0x0001…0xFFFF = returned value that is
mapped from KNX5100C Function List >
Parameter Editor > StatusMonitor ID063
ParamterMonitor5Value DINT Parameter monitor selection 5.
4 = No parameter is selected
0x0001…0xFFFF = returned value that is
mapped from KNX5100C Function List >
Parameter Editor > StatusMonitor ID064
Table 17 - Kinetix 5100 Motion Drive Input Assembly Data (Continued)
Name Data Type Description Value Comment
Table 18 - Kinetix 5100 Motion Drive Output Assembly Data
Name Data Type Description Value Comment
OperatingMode SINT
This enumerated value indicates the drive's internal
mode setting. The drive can operate in different
submodes while in IO Mode.
-128…-1 = Reserved
0 = Mode not specified
1 = Position mode
2 = Speed mode
3 = Home mode
4 = Torque mode
5 = Gear mode
6 = Index mode
7 = ECAM mode
8…127 = Reserved
ServoControl SINT
ServoControl.0 BIT A transition from 0 to 1 enables the motor. ServoOn
ServoControl.1 BIT A transition from 0 to 1 disables the motor. ServoOff
ServoControl.2 BIT A transition from 0 to 1 stops motion on the motor. StopMotion
ServoControl.3 BIT A transition from 0 to 1 clears an active drive fault. FaultReset
ServoControl.4 BIT
A transition from 0 to 1 means that the motion
command is issued from the external controller.
StartMotion
HomingMethod SINT The method of Homing.
For more information, see the Kinetix
5100 EtherNet/IP Indexing Servo Drives
User Manual, publication 2198-UM004
.
SpeedReference DINT The commanded speed for the motor.
Units are in 0.1 RPM
-80000…+80000
1…20000 (home mode)
AccelReference DINT The commanded acceleration rate for the motor. Units are in 0.1 RPM/sec
DecelReference DINT The commanded deceleration rate for the motor. Units are in 0.1 RPM/sec
PositionReference DINT The commanded position used for indexing.
The scaling relationship from the E-gear
ratio in KNX5100C software defines the
User units.
HomeReturnSpeed DINT
The return speed when home mode is the operating
mode.
Units are in 0.1 RPM (rotary motors)
1…5000
NonCyclicMoveType SINT
Enumerated value used to determine the noncyclic
move type.
-128…-1 = Reserved
0 = Absolute
1 = Relative
2 = Incremental
3 = High-speed capture
4…127 = Reserved

 Loading...
Loading...






