42 Rockwell Automation Publication 750-AT006D-EN-P - January 2022
Chapter 2 Product Features
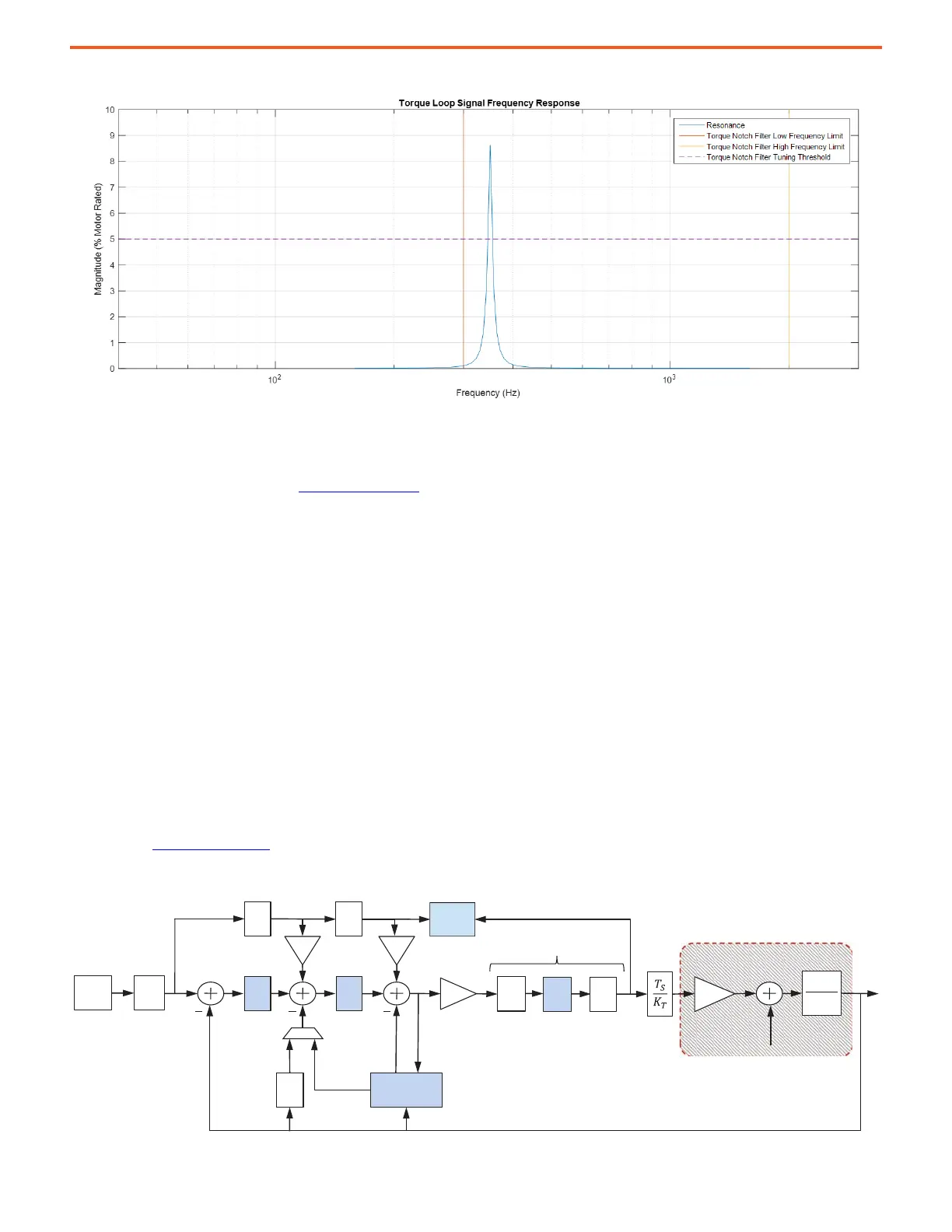
Figure 40 - Identifying One MF Resonance
Gain Stabilization
10:2110 [AdptTune Config] = Gain Stb (2) or TrkNFGainStb (3) – When a LF resonance is detected with a magnitude greater than the 10:2134
[GnStab TorqueLim] threshold line, see Figure 35 on page 35, Gain Stabilization does two main things until the LF resonance magnitude
decreases below the threshold or an instability occurs:
1. It enables and tunes the low pass filter to suppress resonances if any are identified above the low frequency limit. Here, the Torque
Low Pass Filter Bandwidth Estimate is applied to the torque low pass filter instead of the Torque Low Pass Filter Bandwidth. The
bandwidth estimate is incrementally decreased from its default value until the identified HF resonances are suppressed or until an LF
resonance or instability occurs.
2. Adaptive tuning detunes control loop gains to suppress any remaining resonances and stabilize the system if necessary. Here, the
following gains are scaled by adaptive tuning 10:2121 [AdptTune GnScale], the Gain Scaling Factor.
• Load Observer Bandwidth
• Load Observer Integrator Bandwidth
• Velocity Loop Bandwidth
• Velocity Loop Integrator Bandwidth
• Position Loop Bandwidth
• Position Loop Integrator Bandwidth
This scaling means that the actual control loop gains applied in the regulators are multiplied by the gain scaling factor internally. The scaling
factor is incrementally decreased from its default value of 1 until the system is stable. When Gain Stabilization is not enabled, the scaling
factor is reset to its default value so that control loop gains are not affected. Parts of the control loop structure affected by this mode are
highlighted in Figure 41 on page 42
.
Figure 41 - Gain Stabilization Configuration
2
1
sJ
T
PI
s
PI
s
Fs
K
T
P
REG
V
REG
Velocity
Feedback
Filter
Position
Feedback
Velocity
Estimate
Feed
Forwards
Kvff Kaff
Position
Command
LP
LL
N
Torque Loop Filters
Load Torque
Load
Observer
K
J
Torque
Estimate
Adaptive
Tuning
RN
System Under Control
P
REF
 Loading...
Loading...


