User Manual
120
User Manual
121
In addition, if the parameter is set to 1, if the running command of the
inverter fault reset time is valid, the inverter does not respond to the running
command, and the running command must be removed before the running
protection state can be eliminated.
Setting this parameter to 1 can prevent the danger caused by the motor
responding to the running command when power is turned on or when the
fault is reset without knowing it.
P8-19
Frequency detection
value FDT1
0.00Hz~Maximum
frequency
Default : 50.00Hz
P8-20
Frequency detection
hysteresis value FDT1
0.0%~100.0%
(FDT1 Level)
Default : 5.0%
When the running frequency is higher than the frequency detection value,
the inverter multi-function outputs ON signal, and after the frequency is lower
than the detection value, the output ON signal is cancelled.
The above parameters are used to set the detection value of the output
frequency and the hysteresis value of the output action release. Where P8-20
is the percentage of the hysteresis frequency relative to the frequency
detection value P8-19. Figure 6-18 shows the function of the FDT function
Figure 6-18 FDT level diagram
Output frequency Hz
FDT level
Frequency arrival
detection signal
FDT hysteresis value
= P8-19xP8-20
Time t
Time t
ON
P8-21
Frequency arrival
detection width
0.0%~100.0%
(Maximum frequency)
Default : 0.0%
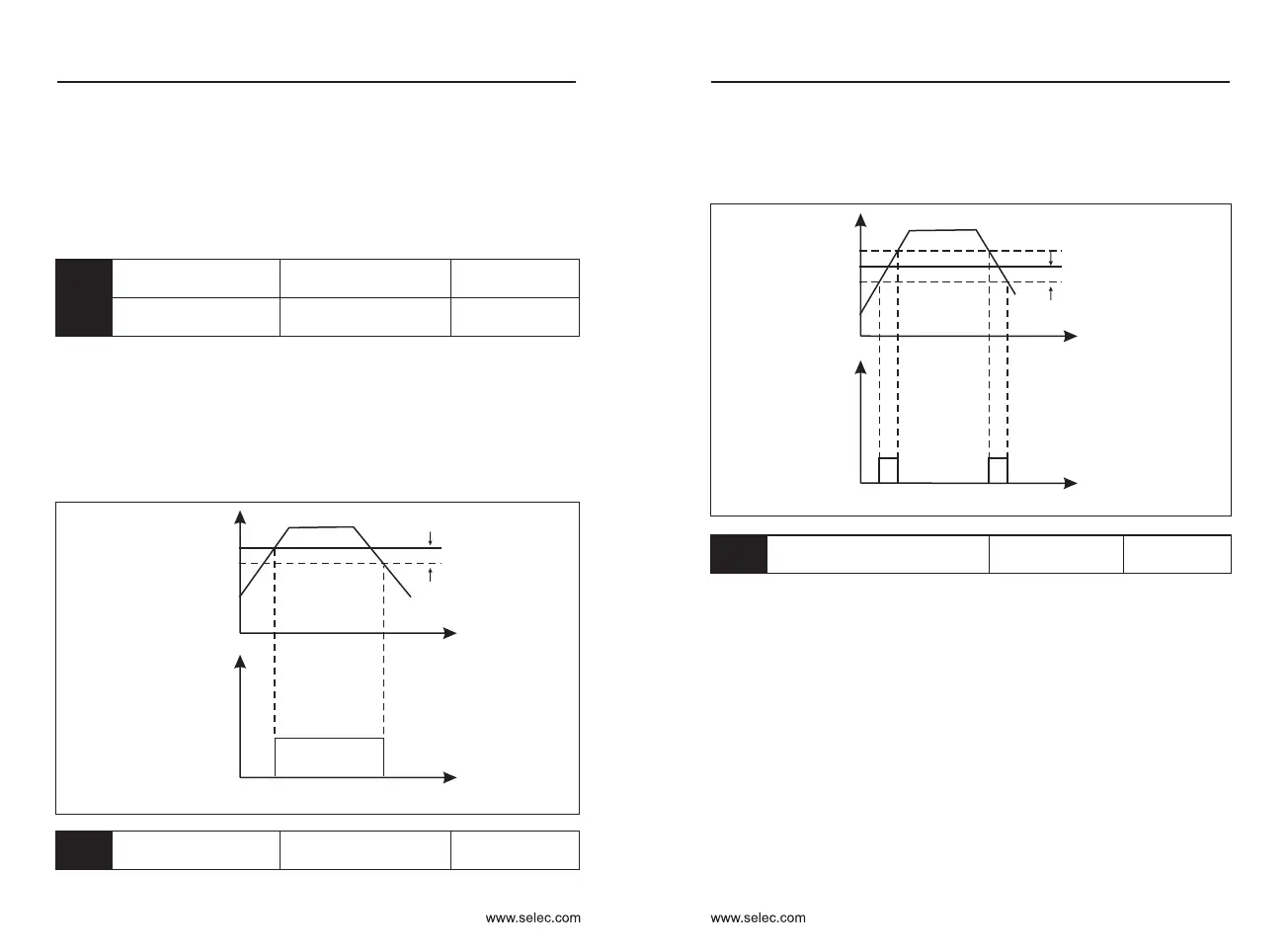
This parameter is used to set the detection range of the frequency arrival,
which is a percentage relative to the Maximum frequency.
When the running frequency of the inverter is within a certain range of the
target frequency, the inverter multi-function outputs ON signal.
Figure 6-19 Schematic diagram of frequency arrival detection amplitude
Time t
Output frequency Hz
Set frequency
Detection range
Frequency arrival
Detection single
ON ON
P8-22
Jump frequency
during acceleration/deceleration
0: invalid 1: valid Default:0
When set to valid, when the running frequency is in the skip frequency
range, the actual running frequency will skip the set skip frequency boundary.
Figure 6-20 shows the effective hopping frequency during acceleration and
deceleration.
This function code is used to set whether the skip frequency is valid
during acceleration and deceleration.
Chapter 6 Chapter 6

 Loading...
Loading...