Installation
Doc. # 177/52705
Rev. 1.0
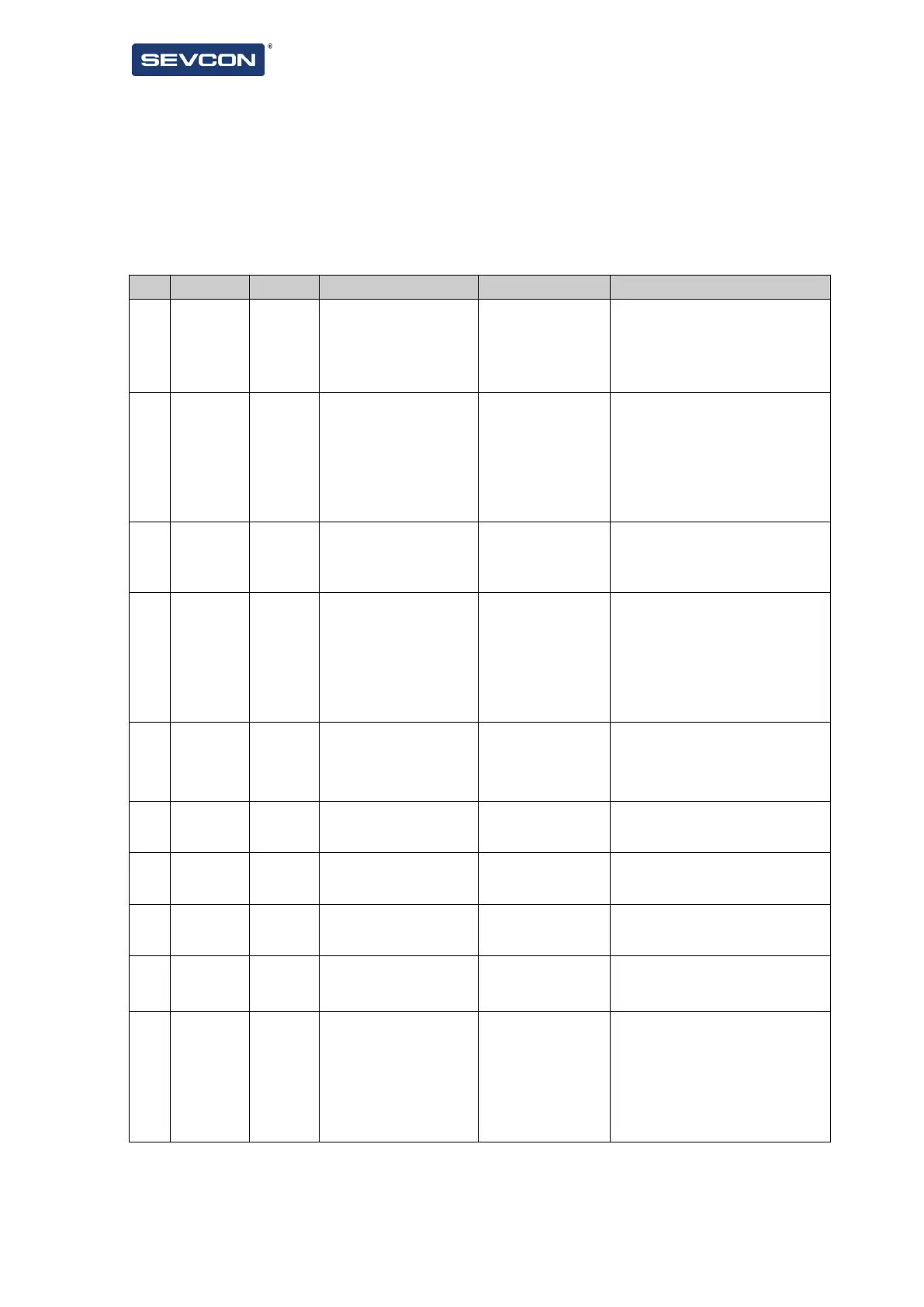
Signal wiring
Assemble your wiring harness using wire of the sizes recommended below. The use of twisted pair and in
some cases twisted-shielded cables is recommended for the speed sensor and CANbus wiring.
To make a connection, gently push the connector housing onto the appropriate mating half on the
Dragon8. Never force a connector. Connectors are keyed to prevent incorrect insertion.
From “dead” side of key
switch via suitable fuse
V = 14V or 24V
(Nominal)
I = 1A maximum plus
current required for
digital outputs.
This input supplies power from the
battery for all the logic circuits.
The unit cannot operate without “Key
switch in” supply.
Encoder:
A if using AB
or U if using UVW
or Sin if using SinCos
or Analogue input Ain4
or Analogue as digitial
input DIn7
Shielded cable should be used for
encoder connections. Motor must be set
up correctly for motor speed feedback
type. Only one encoder type can be
configured at a time.
From digital switch input 3.
In a basic configuration this
is usually the foot-switch
direction switch (FS1).
Type B
V = Vb
See Table 3
Either From a thermistor
device inside the motor
or Ain3
V = 5 V
(via 2.2 kΩ internal
pull-up resistor)
Programmable table to program
resistance / temperature profile for the
thermistor.
Connect the other lead of the
thermistor to the Logic 0V terminal of
the Dragon8 controller.
Can also be used as an additional
analogue input
6V peak to peak from
resolver
Shielded cable should be used for
encoder connections. Motor must be set
up correctly for motor speed feedback
type. Only one encoder type can be
configured at a time.
This output can be used to power
transducers or similar devices at 10V
and up to 200mA.
This output can be used to power
transducers or similar devices at 5V and
up to 200mA.
Maximum bus speed 1 Mbits/sec. Note
that the CANbus signals are referenced
to Control 0V (pin 22).
To the switched high side
of contactor or valve coil.
This output provides high side voltage
control to the load.
Encoder:
B if using AB
or V if using UVW
or Cos if using SinCos
or Analogue input Ain5
or Analogue as digitial
input DIn8
Shielded,cable should be used for
encoder connections. Motor must be set
up correctly for motor speed feedback
type. Only one encoder type can be
configured at a time