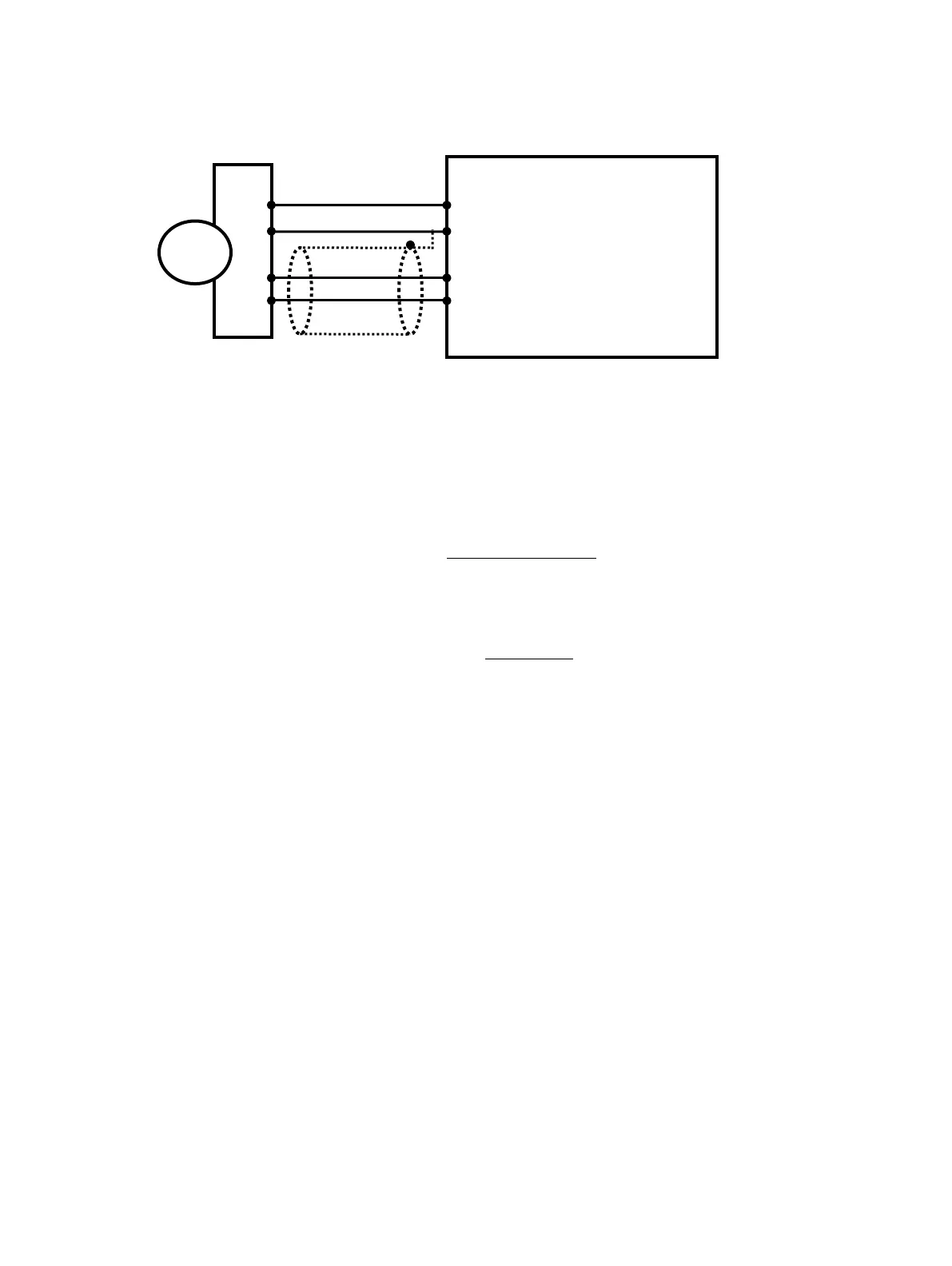
Figure 14 - Sample wiring for an AB quadrature speed encoder (encoder pin names may vary).
* Encoder supply may be connected to Dragon8 pin6 (+10V) or pin7 (+5V).
The number of encoder pulses per revolutions (n) and the maximum motor speed (N) are related to, and
limited by, the maximum frequency of the encoder signal (f
max
).
with f
max
limited to 200 kHz, and
Please refer to page 51 for information on entering encoder settings.
Motor commutation sensor
Commutation sensors are designed to measure the absolute position of the rotor shaft within the motor,
rather than its rotational speed. Rotor position information is used for control of permanent magnet
motors, as it allows the controller to energise the motor phases appropriately based on the measured
position of the magnets on the rotor.