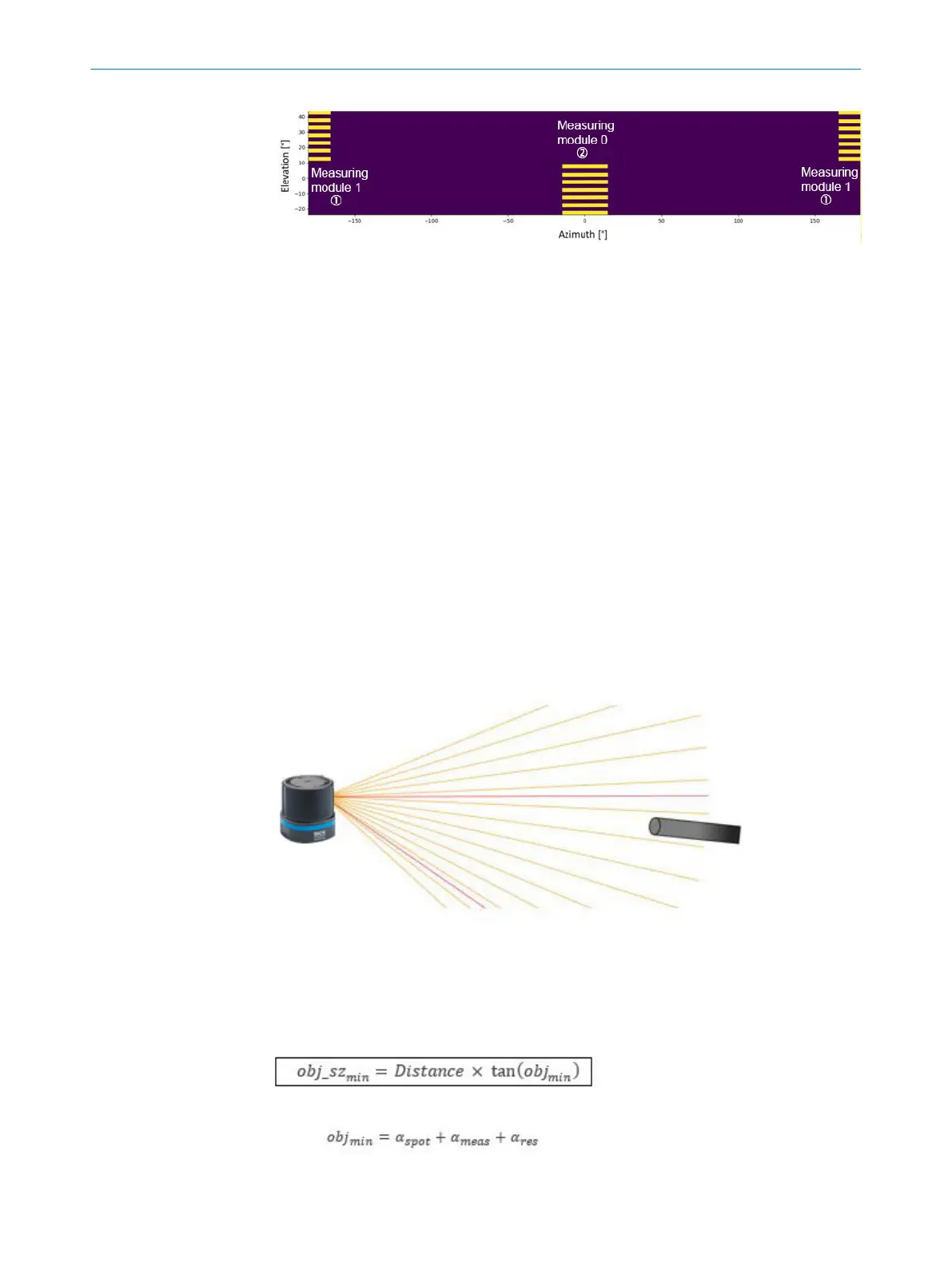
Figure 23: Example azimuth and elevation angles for the data recorded within a segment (RECTI‐
FIED)
1
Measuring module 1
2
Measuring module 0
3.4.8.5 ROS driver
Suitable drivers for integrating the device into the ROS (Robot Operating System) are
available for download on the product page.
The call is made via the SICK Product ID: pid.sick.com/{P/N}/{S/N}
{P/N} corresponds to the part number of the product (see type label).
{S/N} corresponds to the serial number of the product (see type label).
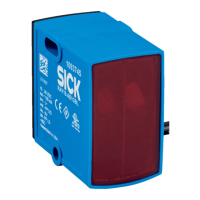
3.4.9 Object sizes
Due to the angle between two scan layers, the detection of an object depends on its
size and distance from the device. The device may not be able to detect the object if the
beams go past it rather than hit it. This applies both to the width and also the height of
the relevant object.
The transmit spot is never smaller than 13mm (diameter of the transmitter opening/
lens)
Figure 24: Laser beams pass the object without hitting it (side view)
The smallest object at a desired distance that can still be reliably detected is described
by the size obj_sz
min
[mm] and is defined by the following formula.
The formula is only valid for objects larger than 13mm.
PRODUCT DESCRIPTION
3
8027119/0000/2022-11 | SICK O P E R A T I N G I N S T R U C T I O N S | multiScan136
29
Subject to change without notice