5
5.5 SIMODRIVE POSMO A functions
5-167
Siemens AG 2013 All Rights Reserved
SIMODRIVE POSMO A User Manual (POS1) – 08/2013 Edition
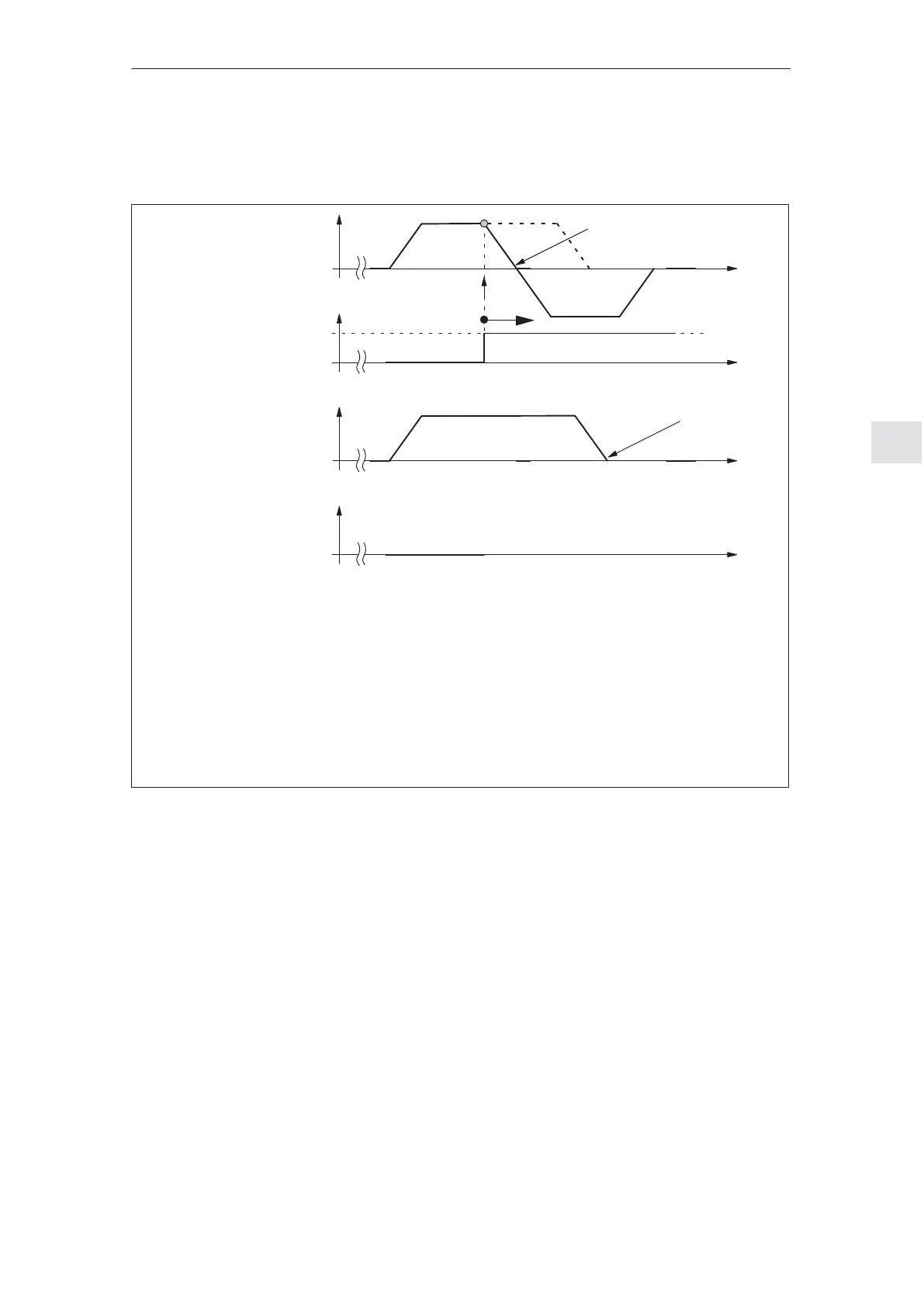
Position–controlled traversing motion to the cam/BERO with stop
if a cam was not detected.
v
t
1
0
Block 9
Block 11
Brakes along the braking ramp
Block change with delete distance to go
The position value is written into P62
(measuring position)
Continue the program (here: block 10)
t
Input signal
”Flying measurement”
What happens for a 0/1 signal edge?
The drive changes after the traversing distance, specified
in block 9, to block 10.
The drive stops because this does not contain a start
condition. This means, that in comparison to a
speed–controlled solution, it can be ensured that the drive
does not endlessly move if the cam/BERO is either not
wired at all or is defective.
What happens if an edge is
not detected?
Block 10
v
t
1
0
Block 9
t
Input signal
”Flying measurement”
Block 10
Fig. 5-10 Example: Position–controlled traversing motion to cam/BERO with stop
Using a special configuration of the traversing blocks, the ”flying mea-
surement” function can be executed so that the drive stops if the
BERO/cam is not reached within a specified maximum distance. In this
particular case, the program is still active and must be interrupted using
a stop command.
In this case, the first program block selected is – e.g. block No. 9.
What should be done?
The following has to be done in order to use the ”flying measurement”
function?
1. Connect the signal transmitter to digital input 1 (X5 terminal I/Q1)
––> the signal transmitter must be high active
––> refer to Chapter 2.3 and 2.4
Example
5 Description of the Functions
02.9908.0208.02