Page 10
3 DOF Motion Systems
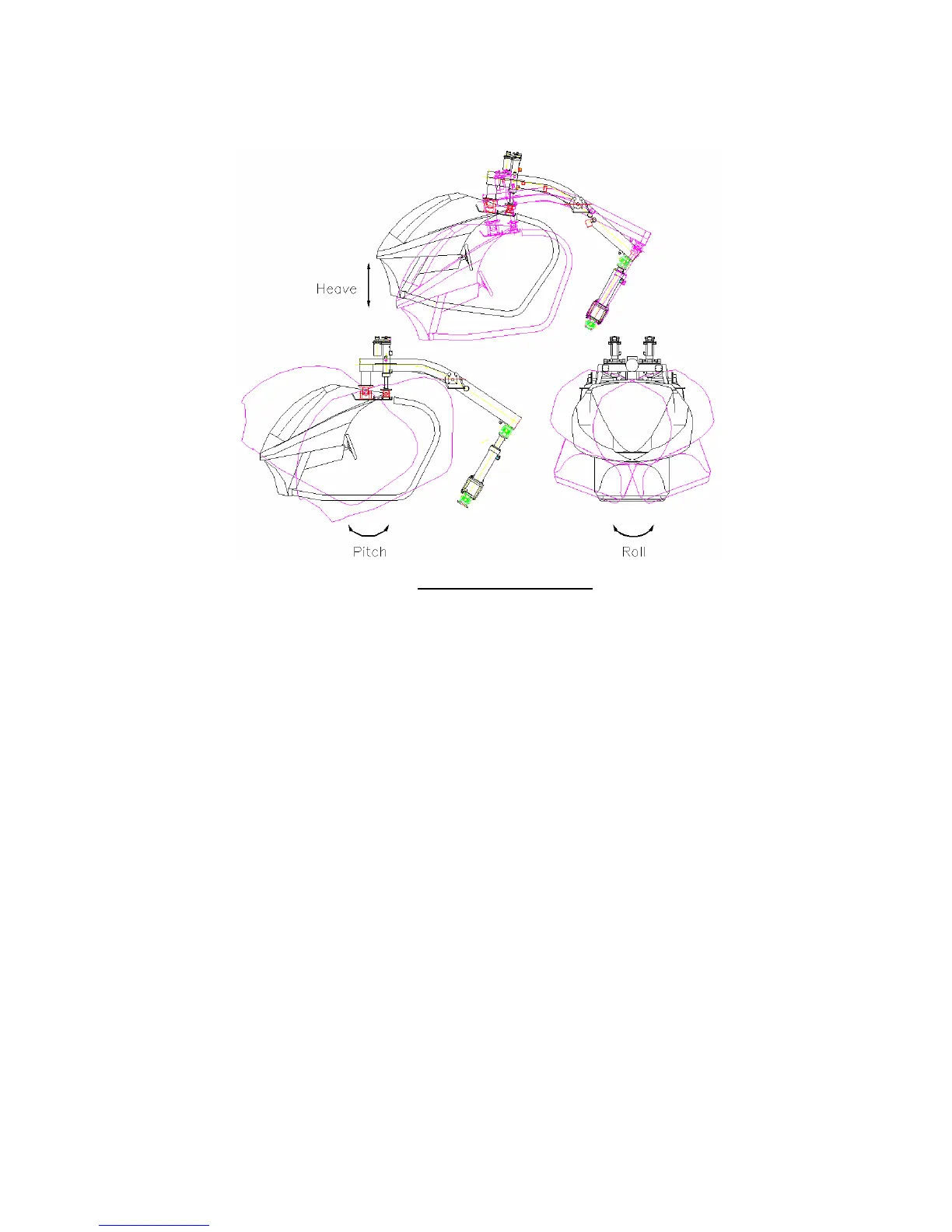
The heave actuator produces up/down heave motion by rocking the rocker arm, which
holds the passenger cabin. The two suspended actuators on the rocker arm
assembly produce the relative pitch and roll motions
Separate controllers inside the MSCU control each of the linear actuators. The
controllers are in turn connected to the motion controller board, which generates the
commands for each actuator via high-speed industrial Control Area Network (CAN)
cable.
During the game, the game computer regularly sends the attitude data and other
dynamic properties data in real time to the motion control computer. The motion
board then calculates in real time, the motion necessary to give the passenger the
best feeling of reality and converts this motion to commands for the motion controllers
and actuators.