Drive Startup Manual M1000
March 5, 2020 ©2020 Smartrise Engineering, Inc. All Rights Reserved Page 13
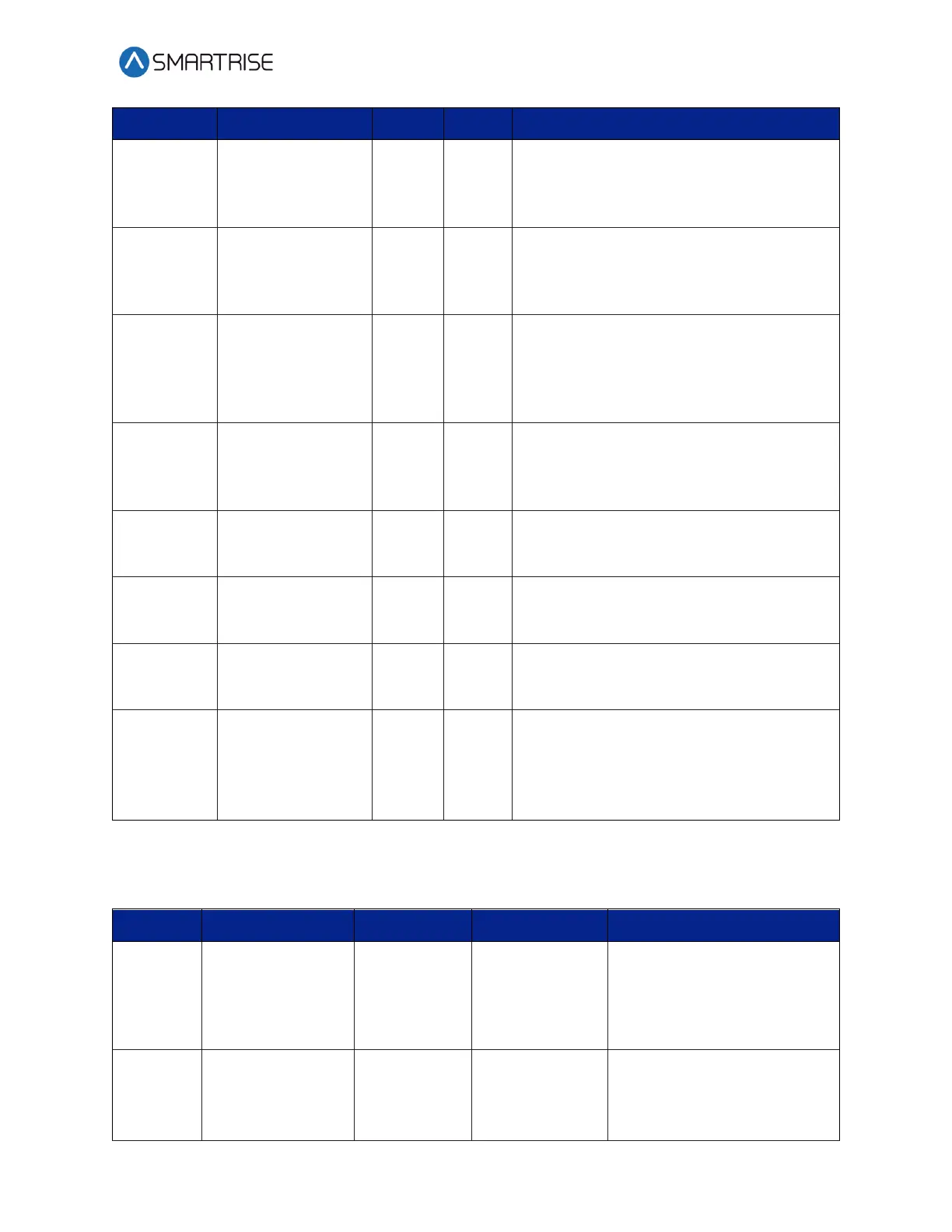
Parameter Description Default Units Suggested Adjustments
Rated FLA
current on the
nameplate
drive
model
This parameter should be set to match the
motor nameplate current. This parameter
is automatically populated after a
Poles
the motor has
This parameter should be set to match the
number of poles inside the motor. This
parameter is automatically populated
after a successful U9 AUTOTUNE.
Motor
Speed
maximum speed
the motor can
rotate
This parameter should be set to a value
that is greater or equal to the RPM
stamped on the nameplate. This
parameter is automatically populated
after a successful U9 AUTOTUNE.
Motor
Speed
speed on the
nameplate
This parameter should be set to match the
motor nameplate speed in RPM. This
parameter is automatically populated
after a successful U9 AUTOTUNE.
Arm Ohms
motor
drive
∧
It is recommended that this setting be
determined by a U9 AUTOTUNE.
Induct
D-Axis
drive
model
It is recommended that this setting be
determined by a U9 AUTOTUNE.
Induct
Q-Axis
drive
model
It is recommended that this setting be
determined by a U9 AUTOTUNE.
Pulse Offs
position of the
magnets to
the encoder zero
It is recommended that this setting be
determined by a U9 AUTOTUNE.
The table below lists the Parameters for C1 User Switches.
Table 11: Parameters for C1 User Switches
Parameter Description Default Units Suggested Adjustments
Rotation
motor that the
drive interprets
as up or down
Reverse
If the elevator is running
controlled but in the wrong
direction, swap BOTH this
parameter and Encoder
Select
encoder interface
Sin/Cos
SerialOnly
EnDat Sin/Cos
Typically, this parameter
should be left at default.