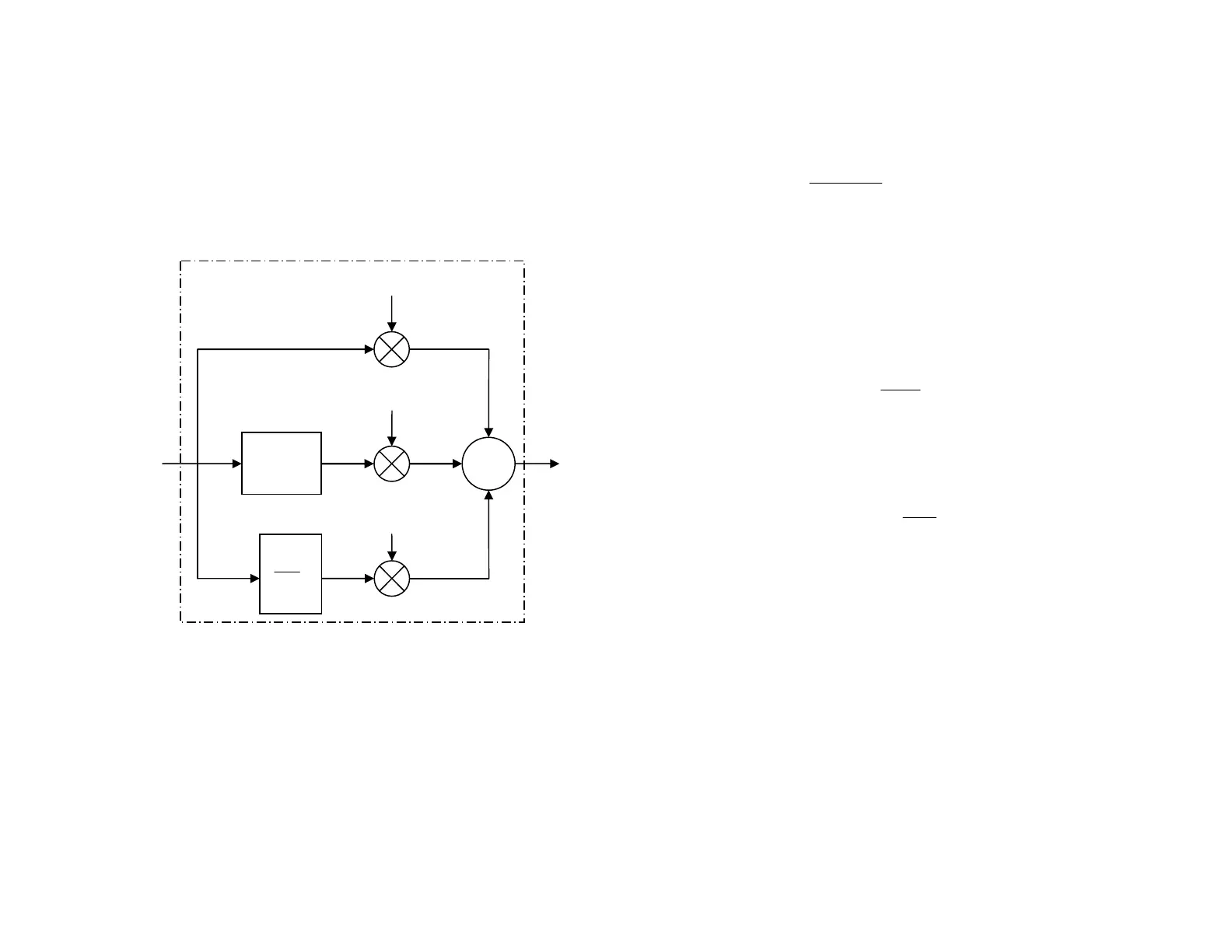
PID Control Review
Proportional term controls loop gain
Integral action increases low frequency gain and
reduces/eliminates steady state errors
Derivative action adds phase lead which improves
stability and increases system bandwidth
∫
++=
D
Kdtte
I
Kte
P
Kty
).()()(
dte.
de
K
P
= Proportional gain
K
I
= Integral gain
K
D
= Derivative gain
+
K
P
K
I
K
D
e(t) y(t)
G
c
(s)
s
D
K
I
P
Ks
G ++=)(
++= s
d
T
s
i
T
C
Ks
C
G
1
1)(
Usually written in “parallel” form:
K
P
= K
C
K
I
= K
C
/T
i
K
D
= K
C
T
d

 Loading...
Loading...