INTERFACE MANUAL
Designation EMS*B ~ EMS*C (Emergency stop contacts 1 & 2)
Input terminal Between CN6–16 and CN6–35 (Emergency stop contact 2)
Between CN6–17 and CN6–36 (Emergency stop contact 1)
Signal logic
Signal judgment
Signal terminal
ON
(Emergency
stop)
OFF
(Normal)
Open O
Short-circuit
O
Function Used to emergency-stop the robot from the external
equipment.
While this signal is open, the processing of robot emergency
stop is executed.
Use this signal by connecting a safety device such as external
emergency stop switch, photoelectric type sensing safety
device and safety mat switch.
When the emergency stop contact is open, system output
signals EMSST_A ~ EMSST_B are short-circuited.
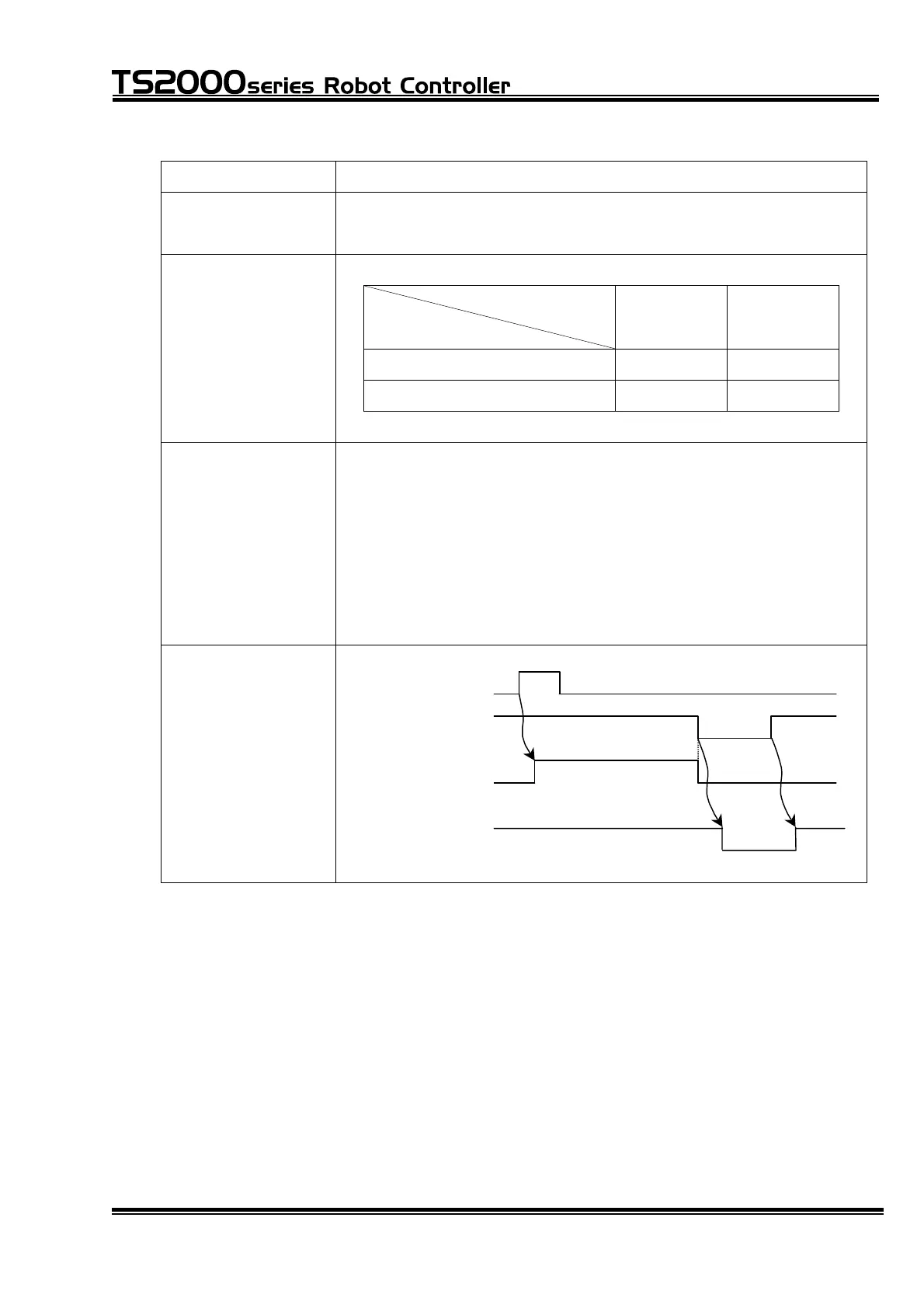
Signal timing
EX_SVON (I)
EMS*B
~EMS*C (I)
SVST_A
~SVST_B (O)
EMSST_A
~EMSST_B (O)
STE 71367
– 58 –

 Loading...
Loading...





