Allgemeines [General]
Printed in the Federal Republic of Germany TR-Electronic GmbH 2007, All Rights Reserved
08/05/2011 TR - ELA - BA - DGB - 0004 - 03 Page 7 of 36
1.4 Allgemeine Funktionsbeschreibung
[General functional description]
Das Messprinzip basiert auf einer Laufzeitmessung
(Ultraschallbereich). Die Ultraschall-Laufzeit ist
wegproportional und wird in einer Elektronik ausgewertet. In
einem Schutzrohr ist ein ferromagnetischer Draht
(Magnetostriktives Messelement–Wellenleiter) gespannt, der
mit einem Stromimpulse beaufschlagt wird. Durch den
Stromimpuls entsteht um den Draht ein radiales Magnetfeld.
Als Positionssensor (Permanet-Magnet) wird ein
berührungslos zu führendes Magnetsystem verwendet, das
ein magnetisches Längsfeld, bezogen auf den Draht,
erzeugt. Treffen die beiden Magnetfelder, radial vom Draht
und längs vom Magnet, am Messpunkt aufeinander, so wird
ein Torsionsimpuls ausgelöst.
Dieser Torsionsimpuls bewegt sich als Körperschallwelle mit
konstanter Ultraschallgeschwindigkeit vom Messpunkt in
beide Richtungen des Drahtes. Über einen
Messwertaufnehmer im Sensorkopf wird das Ultraschall-
Signal erfasst und in ein elektrisches wegproportionales
Ausgangssignal umgewandelt.
Die sich in beiden Richtungen bewegenden
Körperschallwellen werden in den Dämpfungszonen am
Anfang und Ende des Messelementes abgeschwächt.
Die Zeitdifferenz vom Aussenden des Stromimpulses bis
zum Eintreffen des Torsionsimpulses setzt die
Messelektronik in ein wegproportionales Ausgangssignal um
und stellt dies als digitales oder analoges Signal zur
Verfügung.
The measuring principle is based on a run time measurement
in the ultrasound area. The ultrasound propagation time is
path proportional and is evaluated in an electronics. A
ferromagnetic wire is (magnetostrictive measuring element
shaft conductor) in a reed capsule tense, this one are
pressurized with a current pulse. A radial magnetic field
arises from the current pulse therefore.
The position sensor (Permanent magnet) is a non-contact
and wear free measurement magnetic system, which
produces a magnetic axial field, related to the wire. If the
two magnetic fields, radially from the wire and axial from
the magnet, meet one another at the measuring point, then a
torsion impulse will generated.
This torsion impulse moves as acoustic wave of the
measuring body with constant ultrasonic sound speed of the
measuring point in both directions of the wire.
Over a sensing element in the sensor head the ultrasonic
sound signal is recorded and converted into electrical away-
proportional output signal. The acoustic wave of the
measuring body moving in both directions are weakened in
the dämping zones at the beginning and end of the
measuring element.
The time difference of sending the current pulse up to the
arrival of the torsion impulse converts measuring electronics
into a away-proportional output signal and makes this
available as digital or analog signal.
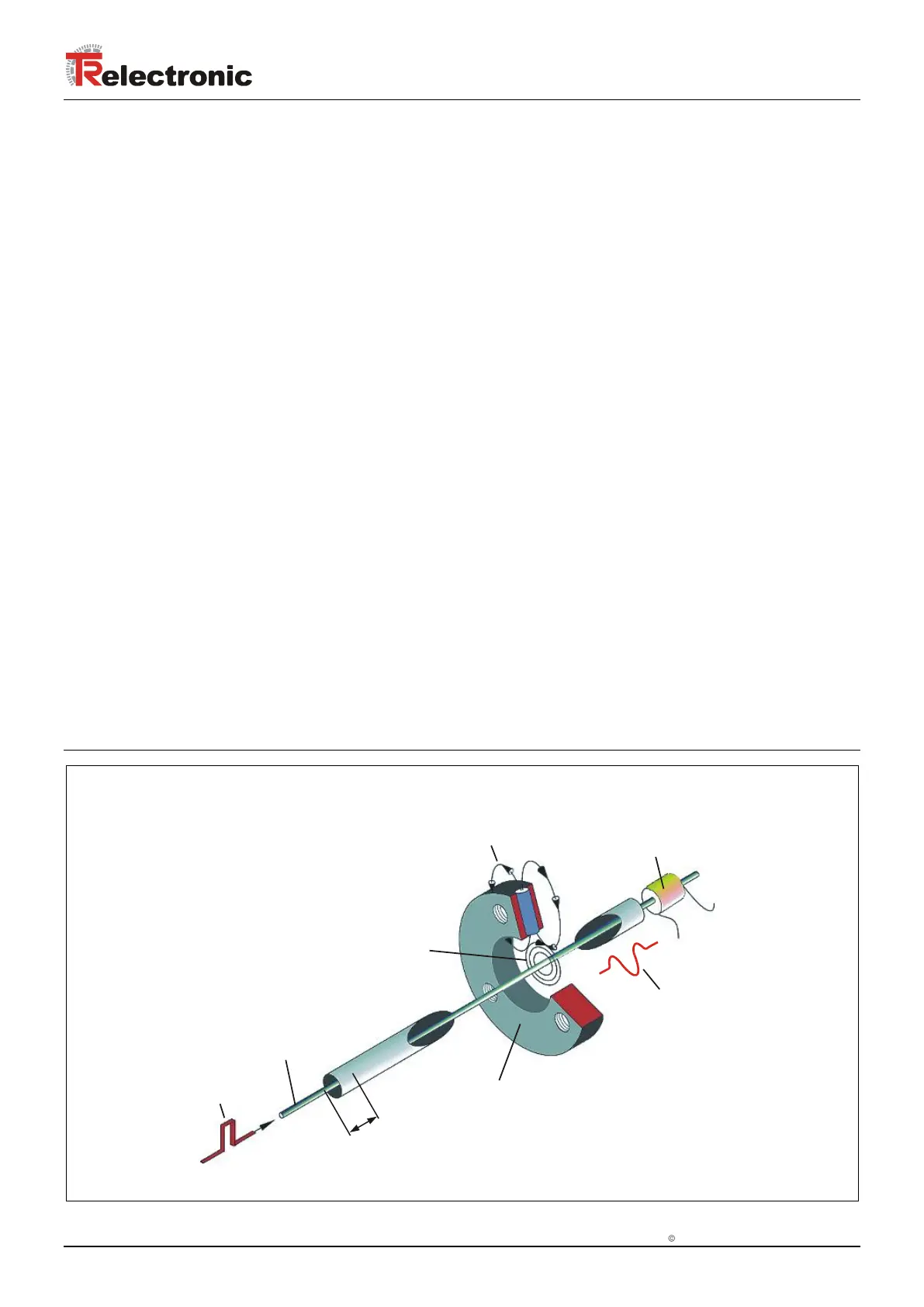
Prinzip [Principle]
Stromimpuls /
Current impulse
Messdraht /
Slide wire
Dämpfungszone /
Damping zone
Magnetfeld, erzeugt durch
einen Stromimpuls /
Magnetic field, produced
by a current impulse
Resultierendes Magnetfeld
am Positionssensor /
Resulting magnetic field
at the position sensor
Messwertaufnehmer
Empfangsspule /
Measuring sensor
Receipt coil
Positionssensor (Magnet) /
Position sensor (Magnet)
Antwortsignal des
Torsionsimpulses /
Answer signal of the
torsion impulse

 Loading...
Loading...






